Turbo Pascal
“Borland Turbo Pascal is a Pascal programming language compiler with an Integrated Development Environment targeted at the hobbyist and entry-level market.” - Win World PC
Version
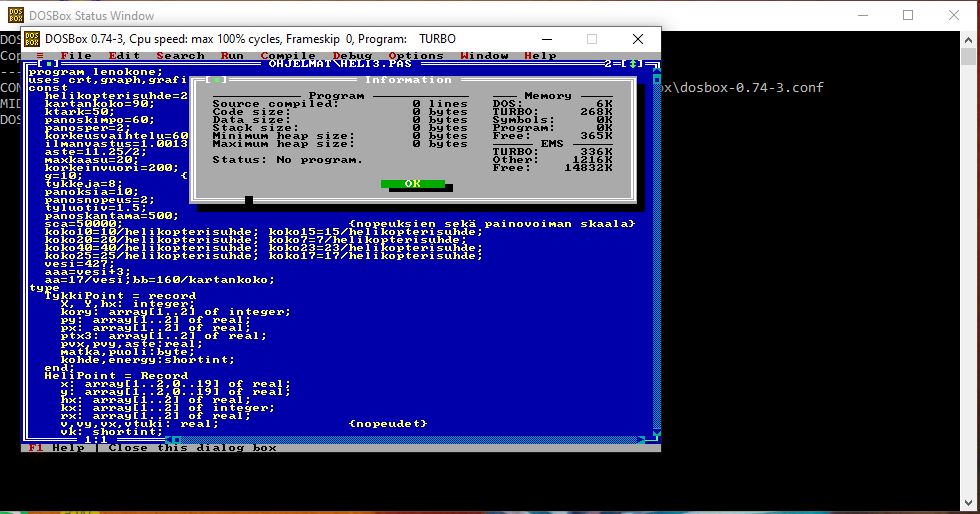
My old files were not working after testing TP5.5 and the most recent DOSBox 0.74-3 and Turbo Pascal. I learned Turbo Pascal in the mid of 90s. If I remember correct, I got a Finnish text book and disk with it from Santa Claus. In my programs I have used GRAFIIKKA.TPU or with 8 characters GRAFIIKK.TPU file. In addition I had this next to PAS files: EGAVGA.BGI download. “A Turbo Pascal Unit is a separately-compiled file generated using Turbo Pascal or Borland Pascal for the purpose of linking at build time into an executable file making use of multiple modules. TPU files were introduced in Turbo Pascal 4.0” Turbo Pascal Unit. I got this error: error-72-unit-file-format-error-plz-help Although I copied that to more recent TPs TP5.5 and Turbo Pascal with DOSBox. I was not able to make it work. Luckily I found files for TP and I was able to run code. Actually I had .exe file for almost the most recent game file (HELI2.pas). More TP versions available here. Working version with TURBO editor is available here
Mount folder with oldgames
Start DOSBox, I have DOSBox 0.74-3. Create folder “OLDGAMES” to C-drive and copy yor files there.
Z:\> mount C C:\OLDGAMES
Z:\> C:
C:\> HELI
{kind=link}
or start TURBO
Z:\> mount C C:\OLDGAMES
Z:\> C:
C:\> TURBO
Tips:
- alt-key: open menu and use arrow keys
- windows-key: make possible to take screenshots. Otherwise mouse icon (square) just inside TURBO editor.
dosbox conf: https://www.dosbox.com/wiki/Configuration:CPU
[cpu]
# core: CPU Core used in emulation. auto will switch to dynamic if available and
# appropriate.
# Possible values: auto, dynamic, normal, simple.
# cputype: CPU Type used in emulation. auto is the fastest choice.
# Possible values: auto, 386, 386_slow, 486_slow, pentium_slow, 386_prefetch.
# cycles: Amount of instructions DOSBox tries to emulate each millisecond.
# Setting this value too high results in sound dropouts and lags.
# Cycles can be set in 3 ways:
# 'auto' tries to guess what a game needs.
# It usually works, but can fail for certain games.
# 'fixed #number' will set a fixed amount of cycles. This is what you usually
# need if 'auto' fails. (Example: fixed 4000).
# 'max' will allocate as much cycles as your computer is able to
# handle.
# Possible values: auto, fixed, max.
# cycleup: Amount of cycles to decrease/increase with keycombos.(CTRL-F11/CTRL-F12)
# cycledown: Setting it lower than 100 will be a percentage.
core=auto
cputype=auto
cycles=auto
cycleup=10
cycledown=20
TO
[cpu]
# core: CPU Core used in emulation. auto will switch to dynamic if available and
# appropriate.
# Possible values: auto, dynamic, normal, simple.
# cputype: CPU Type used in emulation. auto is the fastest choice.
# Possible values: auto, 386, 386_slow, 486_slow, pentium_slow, 386_prefetch.
# cycles: Amount of instructions DOSBox tries to emulate each millisecond.
# Setting this value too high results in sound dropouts and lags.
# Cycles can be set in 3 ways:
# 'auto' tries to guess what a game needs.
# It usually works, but can fail for certain games.
# 'fixed #number' will set a fixed amount of cycles. This is what you usually
# need if 'auto' fails. (Example: fixed 4000).
# 'max' will allocate as much cycles as your computer is able to
# handle.
# Possible values: auto, fixed, max.
# cycleup: Amount of cycles to decrease/increase with keycombos.(CTRL-F11/CTRL-F12)
# cycledown: Setting it lower than 100 will be a percentage.
core=auto
cputype=auto
cycles=max
cycleup=10
cycledown=20
and I think HELI2 game was a bit faster. However, I think I should have better cputype.
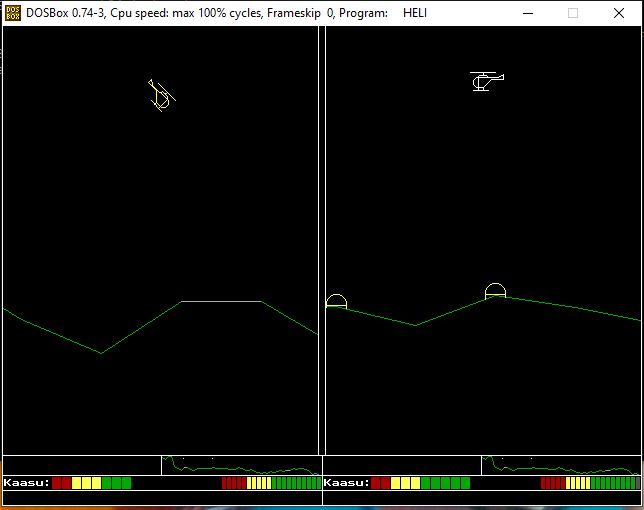
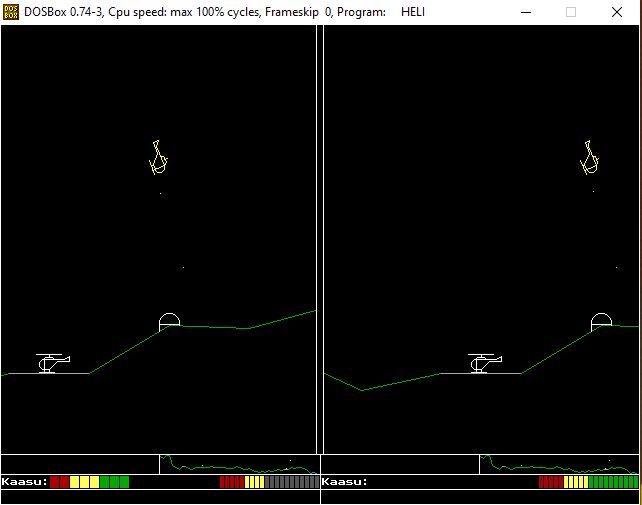 Yellow copter attacs to White’s base.
Yellow copter attacs to White’s base.
Code
The Helicopter Game has three “published” versions:
- HELI.pas
- HELI2.pas (and map generator)
- HELI3.pas (select control keys and generate new maps)
Setup and generate random map ALOITUS.PAS
I felt a sense of satisfaction as I opened this code file. I was pleasantly surprised by the cleanliness and clarity of the code I had written nearly 20 years ago.
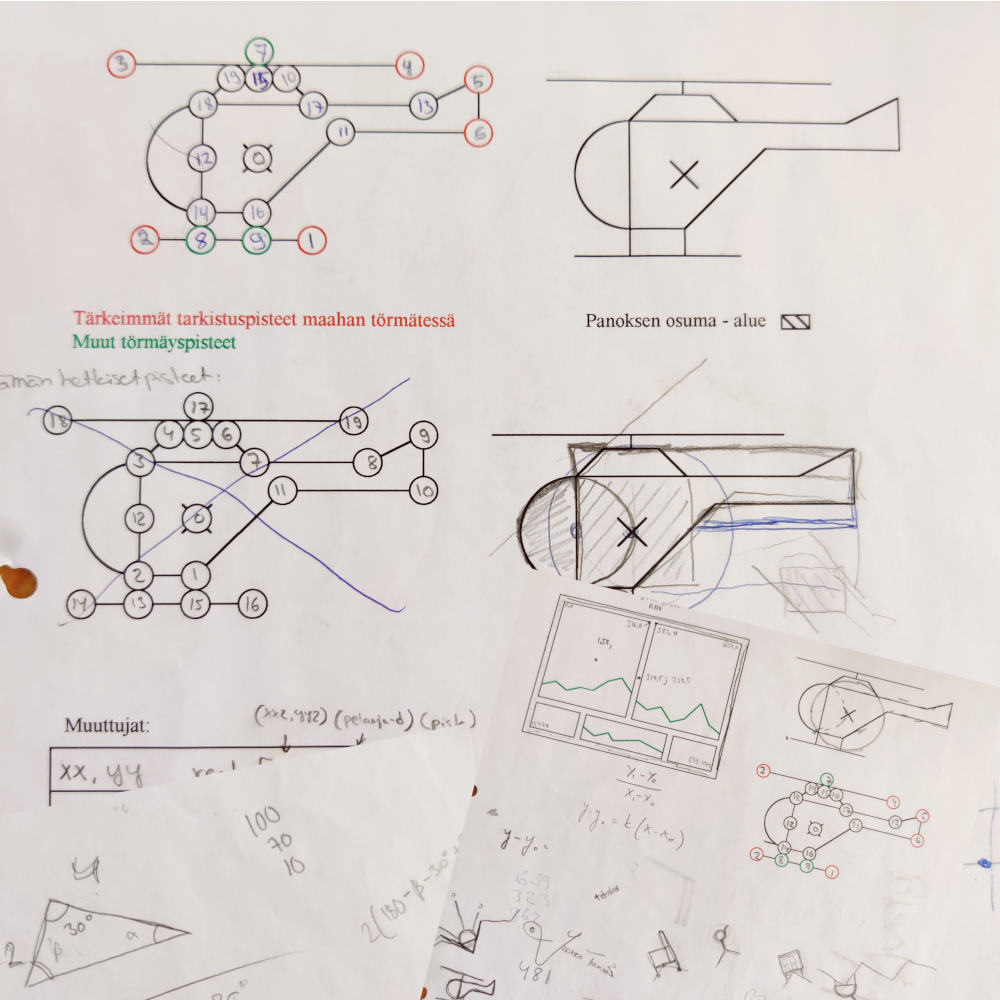
Game Mechanics & Features:
- Two-Player Combat: The game supports two players, with separate input controls (h[1].nap and h[2].nap arrays define control keys for player 1 and 2). This is also evident in the split-screen display suggested by 319(d-1) or 323(d-1) offsets in drawing functions, where d likely represents the player index (1 or 2).
- Helicopter Control: Players can control gas (acceleration/deceleration) using h[d].nap[1] (gas+) and h[d].nap[2] (gas-), turn left (h[d].nap[3]), turn right (h[d].nap[5]), and reverse direction (h[d].nap[4]). Firing is handled by h[d].nap[6].
- Physics Simulation:Gravity (g=10): Helicopters are affected by gravity.
- Air Resistance (ilmanvastus=1.0013): This constant is applied to vy and vx (vertical and horizontal velocities) to simulate air resistance, slowing down the helicopter’s movement over time.
- Collision Detection: “Collision is detected by observing following points,” and the code includes checks for h[d].y[1,a]>maah[a] (helicopter points exceeding terrain height) and h[d].y[1,0]<0 (hitting the ceiling).
- Landing Logic: A specific set of conditions ((maah[1]<443) and (h[d].vy<0.2) and (abs(maah[1]-maah[2])<1) and (a<3) and (h[d].k[1]>80) and (h[d].k[1]<110)) must be met for a successful “laskeutuminen” (landing), implying a realistic landing mechanism. Failure to meet these conditions results in a “loser:=100” state (crash/explosion).
- Combat System:Helicopter Projectiles: Helicopters can “Ampuminen” (shoot) projectiles (panoksia=10, panosnopeus=2). Projectiles disappear after a certain range (panoskantama=500) or upon hitting terrain/targets.
- Ground Turrets (tykkeja=8): The game features ground-based turrets that fire back at helicopters. Turrets have energy (ty[d].energy:=10) and track their targets.
- Damage & Energy: Helicopters have energy:=20. Taking hits from enemy projectiles reduces energy, leading to a “loser” state when energy reaches zero. The game displays energy using colored bars.
- Map Generation:Procedural Map Generation: kartansuunnittelu procedure generates random maps with varying “korkeusvaihtelu” (height variation).
- Map Constants: Constants like kartankoko (map size, e.g., 50, 70, 90), ktark (terrain detail/scale), and vesi (water level) define the landscape.
- Pre-defined Start/End Points: The map typically has a starting position for helicopters and water at the end (map[kartankoko]:=vesi).
- Graphics & Sound:Uses graph unit for graphics (lines, circles, bars, pixels, text output).
- Uses crt unit for basic console operations, including readkey for input and sound for sound effects (e.g., explosion sounds sound(random(100)), hit sounds sound(300)).
- Helicopter drawing involves complex coordinate calculations (helkkarinkoordinaatit procedures) to render its shape and propeller animation (h[d].pro).
- An “explosion” (rajahdys) procedure is implemented with sound and visual effects.
program alku;
uses crt,graph,grafiikka;
const
helikopterisuhde=2;
tykkeja=4;
panoksia=2;
kartankoko=50;
ktark=80;
korkeusvaihtelu=50;
ylinkorkeus=375;
aa=80/479;
bb=640/(kartankoko-1);
vesi=427;
koko10=10/helikopterisuhde; koko15=15/helikopterisuhde;
koko20=20/helikopterisuhde; koko7=7/helikopterisuhde;
koko40=40/helikopterisuhde; koko23=23/helikopterisuhde;
koko25=25/helikopterisuhde; koko17=17/helikopterisuhde;
type
TykkiPoint = record
X, Y,hx: integer;
kory: array[1..2] of integer;
py: array[1..2] of real;
px: array[1..2] of real;
ptx3: array[1..2] of real;
pvx,pvy,aste:real;
matka,puoli:byte;
kohde,energy:shortint;
end;
HeliPoint = Record
x: array[1..2,0..19] of real;
y: array[1..2,0..19] of real;
hx: array[1..2] of real;
kx: array[1..2] of integer;
rx: array[1..2] of real;
v,vy,vx,vtuki: real; {nopeudet}
vk: shortint;
k: array[1..2] of real;
suunta: shortint;
ka: real;
nap: array[1..7] of char;
pro,prok: shortint; {Propellin asento sek„ suunta}
loser,energy: shortint;
ampua: integer;
luoti: shortint;
pvx,pvy: array[1..panoksia] of real;
px,py: array[1..2,1..panoksia] of real;
ptx3: array[1..panoksia] of integer;
panosmatka: array[1..panoksia] of integer;
aloitusx,aloituskx,aloitusy: integer;
savu: array[1..2,1..11] of integer;
end;
var
sx,a,q,c,d,b:integer;
map: array[1..kartankoko] of integer;
mapt: array[1..kartankoko] of shortint;{Karttatiedot-tyyppi}
merkki:char;
nap: array[1..2,1..7] of char;
na: array[1..7] of string;
f: file of char;
f1: file of integer;
f2: file of shortint;
vaih: array[0..4] of string;
ty: array[1..tykkeja] of TykkiPoint;
h: array[1..2] of HeliPoint;
kulmakartta,karttaero: real;
{*************************** Kartansuunnittelu ******************************}
procedure kartansuunnittelu;
begin
repeat
sx:=trunc(320/ktark);
map[1]:=10;
for a:=2 to kartankoko do begin
if map[a-1]>vesi-4 then begin
b:=random(5);
if b=0 then
map[a]:=map[a-1]-korkeusvaihtelu-random(korkeusvaihtelu*2)
else
if map[a-1]=vesi then map[a]:=vesi-2 else map[a]:=vesi;
end
else map[a]:=map[a-1]+korkeusvaihtelu-random(korkeusvaihtelu*2);
if map[a]<ylinkorkeus then map[a]:=map[a]+korkeusvaihtelu-random(10);
if map[a]>vesi+1 then map[a]:=map[a]-korkeusvaihtelu-random(trunc(korkeusvaihtelu/3));
end;
map[sx-1]:=-50;
map[sx]:=-50;
map[kartankoko]:=vesi;
map[kartankoko-1]:=vesi-2;
map[kartankoko-2]:=vesi;
h[1].aloituskx:=sx+3+random(3);
h[2].aloituskx:=kartankoko-5-random(3);
for d:=1 to 2 do begin
h[d].aloitusx:=round((h[d].aloituskx+0.5)*ktark)-316;
a:=round(10)+10;
map[h[d].aloituskx]:=map[h[d].aloituskx]-a;;
map[h[d].aloituskx+1]:=map[h[d].aloituskx];
h[d].aloitusy:=trunc(map[h[d].aloituskx]-koko15);
end;
for a:=2 to kartankoko do
if (map[a-1]>vesi-4) and (map[a]>vesi-4) then mapt[a-1]:=4 else mapt[a-1]:=3;
for d:=1 to 2 do
mapt[h[d].aloituskx]:=d;
for d:=1 to tykkeja do begin
b:=round(kartankoko/2);
c:=0;
repeat
c:=c+1;
if d<=tykkeja/2 then a:=random(b-10)+5 else a:=b+random(b-10)+5;
if c>100 then d:=tykkeja;
until (c>100) or ((mapt[a]=3) and (map[a]<map[a-1]) and (map[a]<map[a+1]));
mapt[a]:=d+10;
ty[d].x:=a;
ty[d].y:=map[ty[d].x];
kulmakartta:=-(map[ty[d].x]-map[ty[d].x-1])/ktark;
karttaero:=koko20;
ty[d].kory[1]:=ty[d].y+round(karttaero*kulmakartta);
kulmakartta:=(map[ty[d].x]-map[ty[d].x+1])/ktark;
karttaero:=koko20;
ty[d].kory[2]:=ty[d].y-round(karttaero*kulmakartta);
ty[d].px[1]:=0;
ty[d].py[1]:=0;
ty[d].px[2]:=0;
ty[d].py[2]:=0;
ty[d].pvx:=0;
ty[d].pvy:=0;
ty[d].aste:=0;
ty[d].matka:=0;
if d<=tykkeja/2 then ty[d].kohde:=2 else ty[d].kohde:=1;
if d<=tykkeja/2 then ty[d].puoli:=1 else ty[d].puoli:=2;
ty[d].energy:=10;
ty[d].hx:=ty[d].x*ktark-316;
end;
until c<100;
_tayttovari(0);
bar(0,400,639,479);
setcolor(2);
for a:=2 to kartankoko do begin
if mapt[a-1]=4 then
setcolor(3)
else if mapt[a-1]<=2 then
setcolor(7)
else setcolor(2);
line(trunc(a*bb-bb),408+trunc(map[a]*aa),trunc((a-1)*bb-bb),408+trunc(map[a-1]*aa));
end;
end;
begin
randomize;
grafiikkatilaan;
na[1]:='Kaasua lis„„ ......... ';
na[2]:='Kaasua pois .......... ';
na[3]:='Vasen ................ ';
na[4]:='Ymp„ri k„„ntyminen ... ';
na[5]:='Oikea ................ ';
na[6]:='Ampuminen ............ ';
na[7]:='Aseen vaihto ......... ';
vaih[0]:='0) Aloita peli';
vaih[1]:='1) 1-pelaajan n„pp„imet';
vaih[2]:='2) 2-pelaajan n„pp„imet';
vaih[3]:='3) Uusi kartta';
kartansuunnittelu;
settextjustify(centertext,centertext);
settextstyle(1,0,8);
setcolor(12);
outtextXY(322,50,'Helikopteripeli');
setcolor(14);
outtextXY(318,54,'Helikopteripeli');
settextjustify(lefttext,lefttext);
settextstyle(0,0,0);
setcolor(8);
for a:=0 to 3 do
outtextXY(50,200+a*20,vaih[a]);
setcolor(4);
for a:=0 to 3 do
outtextXY(49,201+a*20,vaih[a]);
merkki:='h';
repeat
merkki:=readkey;
if (merkki='1') or (merkki='2') then begin
val(merkki,a,b);
b:=a mod 2 +1;
for q:=1 to 7 do begin
setcolor(8);
settextjustify(righttext,lefttext);
outtextXY(590,180+20*q,na[q]);
setcolor(12);
outtextXY(589,181+20*q,na[q]);
repeat
nap[a,q]:=readkey;
for c:=1 to 7 do
if nap[b,c]=nap[a,q] then nap[a,q]:=_esc;
if q>1 then
for c:=1 to q-1 do
if nap[a,c]=nap[a,q] then nap[a,q]:=_ESC;
until nap[a,q]<>_esc;
setcolor(8);
outtextXY(590,180+20*q,+nap[a,q]);
setcolor(12);
outtextXY(589,181+20*q,+nap[a,q]);
end;
_tayttovari(0);
delay(200);
bar(590,192,397,324);
end;
if (merkki='3') then kartansuunnittelu;
if (merkki='0') then begin
assign(f,'C:\helikopt.nap');
rewrite(f);
for c:=1 to 7 do
write(f,nap[1,c]);
for c:=1 to 7 do
write(f,nap[2,c]);
close(f);
assign(f1,'C:\helikopt.map');
rewrite(f1);
for c:=1 to kartankoko do
write(f1,map[c]);
close(f1);
assign(f2,'C:\helikopt.ma2');
rewrite(f2);
for c:=1 to kartankoko do
write(f2,mapt[c]);
close(f2);
halt(1);
end;
until merkki=_esc;
end.
HELI2.PAS
Collision is detected by observing following points:
program lenokone;
uses crt,graph,grafiikka;
const
helikopterisuhde=2;
kartankoko=70;
ktark=40;
panoskimpo=60;
panosper=2;
korkeusvaihtelu=60;
ilmanvastus=1.0013;
aste=11.25/2;
maxkaasu=20;
korkeinvuori=200;
g=10; {painovoima}
tykkeja=8;
panoksia=10;
panosnopeus=2;
tyluotiv=1.5;
panoskantama=500;
sca=50000; {nopeuksien sek„ painovoiman skaala}
koko10=10/helikopterisuhde; koko15=15/helikopterisuhde;
koko20=20/helikopterisuhde; koko7=7/helikopterisuhde;
koko40=40/helikopterisuhde; koko23=23/helikopterisuhde;
koko25=25/helikopterisuhde; koko17=17/helikopterisuhde;
vesi=427;
aaa=vesi+3;
aa=17/vesi;bb=160/kartankoko;
type
TykkiPoint = record
X, Y,hx: integer;
kory: array[1..2] of integer;
py: array[1..2] of real;
px: array[1..2] of real;
ptx3: array[1..2] of real;
pvx,pvy,aste:real;
matka,puoli:byte;
kohde,energy:shortint;
end;
HeliPoint = Record
x: array[1..2,0..19] of real;
y: array[1..2,0..19] of real;
hx: array[1..2] of real;
kx: array[1..2] of integer;
rx: array[1..2] of real;
v,vy,vx,vtuki: real; {nopeudet}
vk: shortint;
k: array[1..2] of real;
suunta: shortint;
ka: real;
nap: array[1..6] of char;
pro,prok: shortint; {Propellin asento sek„ suunta}
loser,energy: shortint;
ampua: integer;
luoti: shortint;
pvx,pvy: array[1..panoksia] of real;
px,py: array[1..2,1..panoksia] of real;
ptx3: array[1..panoksia] of integer;
panosmatka: array[1..panoksia] of integer;
aloitusx,aloituskx,aloitusy: integer;
savu: array[1..2,1..11] of integer;
end;
var
{x,y,status:integer;}
kulmakartta,karttaero: real;
t,t2,a,b,c,d,e,sx:integer;
merkki:char;
map: array[1..kartankoko] of integer;{Karttatiedot-korkeus}
mapt: array[1..kartankoko] of shortint;{Karttatiedot-tyyppi}
maah: array[0..6] of integer;
ty: array[1..tykkeja] of TykkiPoint;
h: array[1..2] of HeliPoint;
{*************************** Kartansuunnittelu ******************************}
procedure kartansuunnittelu;
begin
sx:=trunc(320/ktark);
map[1]:=10;
for a:=2 to kartankoko do begin
if map[a-1]>vesi-4 then begin
b:=random(5);
if b=0 then
map[a]:=map[a-1]-korkeusvaihtelu-random(korkeusvaihtelu*2)
else
if map[a-1]=vesi then map[a]:=vesi-2 else map[a]:=vesi;
end
else map[a]:=map[a-1]+korkeusvaihtelu-random(korkeusvaihtelu*2);
if map[a]<korkeinvuori then map[a]:=map[a]+korkeusvaihtelu-random(10);
if map[a]>vesi+1 then map[a]:=map[a]-korkeusvaihtelu-random(trunc(korkeusvaihtelu/3));
if (map[a-1]>vesi-4) and (map[a]>vesi-4) then mapt[a-1]:=2 else mapt[a-1]:=1;
end;
mapt[sx-2]:=1;
map[sx-1]:=-50; mapt[sx-1]:=1;
map[sx]:=-50; mapt[sx]:=1;
h[1].aloituskx:=sx+4;
h[2].aloituskx:=kartankoko-10;
map[kartankoko]:=vesi; mapt[kartankoko]:=2;
map[kartankoko-1]:=vesi-2; mapt[kartankoko-1]:=2;
map[kartankoko-2]:=vesi; mapt[kartankoko-2]:=2;
for d:=1 to 2 do begin
h[d].aloitusx:=round((h[d].aloituskx+0.5)*ktark)-316;
a:=round(10)+10;
map[h[d].aloituskx]:=map[h[d].aloituskx]-a;;
map[h[d].aloituskx+1]:=map[h[d].aloituskx];
h[d].aloitusy:=trunc(map[h[d].aloituskx]-koko15);
mapt[h[d].aloituskx-1]:=1;
mapt[h[d].aloituskx]:=3;
mapt[h[d].aloituskx+1]:=1;
end;
for d:=1 to tykkeja do begin
b:=round(kartankoko/2);
c:=0;
repeat
c:=c+1;
if d<=tykkeja/2 then a:=random(b-10)+5 else a:=b+random(b-10)+5;
if c>100 then halt(1);
until (mapt[a]=1) and (map[a]<map[a-1]) and (map[a]<map[a+1]);
mapt[a]:=d+10;
ty[d].x:=a;
ty[d].y:=map[ty[d].x];
kulmakartta:=-(map[ty[d].x]-map[ty[d].x-1])/ktark;
karttaero:=koko20;
ty[d].kory[1]:=ty[d].y+round(karttaero*kulmakartta);
kulmakartta:=(map[ty[d].x]-map[ty[d].x+1])/ktark;
karttaero:=koko20;
ty[d].kory[2]:=ty[d].y-round(karttaero*kulmakartta);
ty[d].px[1]:=0;
ty[d].py[1]:=0;
ty[d].px[2]:=0;
ty[d].py[2]:=0;
ty[d].pvx:=0;
ty[d].pvy:=0;
ty[d].aste:=0;
ty[d].matka:=0;
if d<=tykkeja/2 then ty[d].kohde:=2 else ty[d].kohde:=1;
if d<=tykkeja/2 then ty[d].puoli:=1 else ty[d].puoli:=2;
ty[d].energy:=10;
ty[d].hx:=ty[d].x*ktark-316;
end;
end;
{***************************** Helik. piirtokord. ***************************}
procedure helkkarinkoordinaatit;
var
c0,c90,s0,s90:real;
propelli:real;
begin
c0:=kosi(h[d].k[1])*h[d].suunta;
c90:=kosi(h[d].k[1]+90)*h[d].suunta;
s0:=sini(h[d].k[1]);
s90:=sini(h[d].k[1]+90);
propelli:=koko25-h[d].pro/helikopterisuhde;
h[d].x[1,16]:=h[d].x[1,0]+c0*koko10;
h[d].y[1,16]:=h[d].y[1,0]+s0*koko10;
h[d].x[1,14]:=h[d].x[1,16]+c90*koko10;
h[d].y[1,14]:=h[d].y[1,16]+s90*koko10;
h[d].x[1,12]:=h[d].x[1,0]+c90*koko10;
h[d].y[1,12]:=h[d].y[1,0]+s90*koko10;
h[d].x[1,18]:=h[d].x[1,14]-c0*koko20;
h[d].y[1,18]:=h[d].y[1,14]-s0*koko20;
h[d].x[1,15]:=h[d].x[1,0]-c0*koko15;
h[d].y[1,15]:=h[d].y[1,0]-s0*koko15;
h[d].x[1,19]:=h[d].x[1,15]+c90*koko7;
h[d].y[1,19]:=h[d].y[1,15]+s90*koko7;
h[d].x[1,10]:=h[d].x[1,15]-c90*koko7;
h[d].y[1,10]:=h[d].y[1,15]-s90*koko7;
h[d].x[1,17]:=h[d].x[1,18]-c90*koko20;
h[d].y[1,17]:=h[d].y[1,18]-s90*koko20;
h[d].x[1,13]:=h[d].x[1,18]-c90*koko40;
h[d].y[1,13]:=h[d].y[1,18]-s90*koko40;
h[d].x[1,11]:=h[d].x[1,0]-c90*koko17-c0*koko7;
h[d].y[1,11]:=h[d].y[1,0]-s90*koko17-s0*koko7;
h[d].x[1,9]:=h[d].x[1,0]+c0*koko15;
h[d].y[1,9]:=h[d].y[1,0]+s0*koko15;
h[d].x[1,8]:=h[d].x[1,9]+c90*koko10;
h[d].y[1,8]:=h[d].y[1,9]+s90*koko10;
end;
procedure helkkarinkoordinaatit2;
var
c0,c90,s0,s90:real;
propelli:real;
begin
c0:=kosi(h[d].k[1])*h[d].suunta;
c90:=kosi(h[d].k[1]+90)*h[d].suunta;
s0:=sini(h[d].k[1]);
s90:=sini(h[d].k[1]+90);
propelli:=koko25-h[d].pro/helikopterisuhde;
{h[d].x[1,0]:=h[d].x[1,0];}
h[d].y[1,0]:=h[d].y[1,0]+h[d].vy;
h[d].x[1,1]:=h[d].x[1,0]-c90*koko10+c0*koko15;
h[d].y[1,1]:=h[d].y[1,0]-s90*koko10+s0*koko15;
h[d].x[1,2]:=h[d].x[1,1]+c90*(koko20+koko10);
h[d].y[1,2]:=h[d].y[1,1]+s90*(koko20+koko10);
h[d].x[1,7]:=h[d].x[1,0]-c0*koko20;
h[d].y[1,7]:=h[d].y[1,0]-s0*koko20;
h[d].x[1,3]:=h[d].x[1,7]+c90*propelli;
h[d].y[1,3]:=h[d].y[1,7]+s90*propelli;
h[d].x[1,4]:=h[d].x[1,7]-c90*propelli;
h[d].y[1,4]:=h[d].y[1,7]-s90*propelli;
h[d].x[1,6]:=h[d].x[1,0]-c90*koko17-c0*koko7-c90*koko23;
h[d].y[1,6]:=h[d].y[1,0]-s90*koko17-s0*koko7-s90*koko23;
h[d].x[1,5]:=h[d].x[1,6]-c0*koko10;
h[d].y[1,5]:=h[d].y[1,6]-s0*koko10;
end;
procedure poyta;
begin
setcolor(15);
cleardevice;
line(0,0,0,479);
line(639,0,639,479);
line(323,0,323,vesi+2);
line(316,0,316,vesi+2);
line(0,vesi+2,316,vesi+2);
line(323,vesi+2,639,vesi+2);
line(0,479,639,479);
line(0,aaa+19,639,aaa+19);
line(0,aaa+34,639,aaa+34);
line(320,479,320,vesi+2);
line(317,vesi+2,322,vesi+2);
line(159,vesi+2,159,aaa+19);
line(479,vesi+2,479,aaa+19);
outtextXY(2,453,'Kaasu:');
outtextXY(322,453,'Kaasu:');
end;
{*************************** Kuoleman j„lkeiset tiedot **********************}
procedure alkutiedot;
begin
h[d].suunta:=d*2-3;
h[d].energy:=20;
h[d].x[1,0]:=158;
h[d].y[1,0]:=h[d].aloitusy;
h[d].hx[1]:=h[d].aloitusx; h[d].hx[2]:=h[d].hx[1];
h[d].rx[1]:=0;
h[d].rx[2]:=0;
h[d].kx[1]:=trunc((h[d].hx[1]+h[d].x[1,0])/ktark);
h[d].kx[2]:=h[d].kx[1];
h[d].ampua:=0;
h[d].loser:=0;
h[d].k[1]:=90; h[d].k[2]:=90; h[d].ka:=0;
h[d].pro:=0; h[d].prok:=5;
h[d].luoti:=0;
for a:=1 to panoksia do
h[d].py[1,a]:=500;
h[d].vk:=0;
h[d].v:=0;
h[d].vtuki:=(h[d].vk+g)/sca;
h[d].vy:=h[d].vk/sca-h[d].vtuki;
h[d].vx:=0;
for a:=1 to h[d].energy do begin
if a<18 then _tayttovari(2);
if a<11 then _tayttovari(14);
if a<6 then _tayttovari(4);
bar(215+a*5+319*(d-1),451,218+a*5+319*(d-1),462);
end;
helkkarinkoordinaatit2;
helkkarinkoordinaatit;
setcolor(2);
for a:=2 to kartankoko do begin
if mapt[a-1]=2 then
setcolor(3)
else if mapt[a-1]=3 then
setcolor(7)
else setcolor(2);
line(160+320*(d-1)+trunc(a*bb-bb),vesi+4+trunc(map[a]*aa),160+320*(d-1)+trunc((a-1)*bb-bb),vesi+4+trunc(map[a-1]*aa));
end;
for a:=0 to 19 do begin
h[d].x[2,a]:=h[d].x[1,a];
h[d].y[2,a]:=h[d].y[1,a];
end;
a:=6;
end;
{*************************** Maan piirto peliss„ ****************************}
procedure maapiirto(yk:integer);
begin
for d:=1 to 2 do begin
sx:=h[d].kx[yk];
if h[d].kx[yk]>=kartankoko then sx:=h[d].kx[yk] mod 2 + kartankoko-2;
if (yk=1) then
if mapt[sx]=2 then
setcolor(3)
else if mapt[sx]=3 then
setcolor(7)
else setcolor(2);
kulmakartta:=(map[sx]-map[sx+1])/ktark;
karttaero:=h[d].kx[yk]*ktark-h[d].hx[yk]-158+ktark;
{ if d=1 then begin
_tayttovari(0);
bar(90,90,160,110);
_kirjoitadesluku(100,100,4,4,karttaero); end; }
c:=trunc(kulmakartta*karttaero+map[sx+1]);
line(165*(d-1)+158*(d-2)+trunc((h[d].kx[yk]+1)*ktark-h[d].hx[yk]),map[sx+1],323*(d-1)+1,c);
a:=h[d].kx[yk]+1;
repeat
sx:=a;
if a>=kartankoko then sx:=a mod 2 + kartankoko-2;
if (yk=1) then
if mapt[sx]=2 then
setcolor(3)
else if mapt[sx]=3 then
setcolor(7)
else setcolor(2);
line(trunc(a*ktark-h[d].hx[yk]+165*(d-1)+158*(d-2)),map[sx],trunc((a+1)*ktark-h[d].hx[yk])+165*(d-1)+158*(d-2),map[sx+1]);
a:=a+1;
until trunc((a+1)*ktark-h[d].hx[yk])>=474;
sx:=a;
if a>=kartankoko then sx:=a mod 2 + kartankoko-2;
if (yk=1) then
if mapt[sx]=2 then
setcolor(3)
else if mapt[sx]=3 then
setcolor(7)
else setcolor(2);
kulmakartta:=-(map[sx]-map[sx+1])/(ktark);
karttaero:=474-(a*ktark-h[d].hx[yk]);
c:=trunc(kulmakartta*(karttaero)+map[sx]);
line(trunc(a*ktark-h[d].hx[yk]+165*(d-1)+158*(d-2)),map[sx],323*(d-1)+315,c);
for a:=1 to tykkeja do begin
if (yk=1) then setcolor(13+ty[a].puoli);
c:=trunc(ty[a].hx-h[d].hx[yk]);
if (c>koko20-158) and (c<316-koko20-158) then begin
line(trunc(c-koko20)+158+323*(d-1),ty[a].y-1,trunc(c-koko20)+158+323*(d-1),ty[a].kory[1]);
line(trunc(c+koko20)+158+323*(d-1),ty[a].y-1,trunc(c+koko20)+158+323*(d-1),ty[a].kory[2]);
line(trunc(c-koko20)+158+323*(d-1),ty[a].y-1,trunc(c+koko20)+158+323*(d-1),ty[a].y-1);
if ty[a].energy>0 then
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc(koko20))
else if ty[a].energy<0 then begin
sound(200-ty[a].energy*20);
if (yk=1) then setcolor(12);
if yk=1 then
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc(-ty[a].energy/helikopterisuhde))
else
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc((1-ty[a].energy)/helikopterisuhde));
if yk=1 then ty[a].energy:=ty[a].energy+1;
if ty[a].energy=0 then begin
setcolor(0);
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc(1/helikopterisuhde));
nosound;
end;
{delay(1000);}
end;
end;
end;
end;
end;
{*************************** Helikopterin piirto peliss„ ********************}
procedure piirto(ply,cd,vari:integer;arx:real);
begin
setcolor(vari);
line(trunc(h[cd].x[ply,16]+arx),trunc(h[cd].y[ply,16]),trunc(h[cd].x[ply,14]+arx),trunc(h[cd].y[ply,14]));
line(trunc(h[cd].x[ply,18]+arx),trunc(h[cd].y[ply,18]),trunc(h[cd].x[ply,8]+arx),trunc(h[cd].y[ply,8]));
line(trunc(h[cd].x[ply,18]+arx),trunc(h[cd].y[ply,18]),trunc(h[cd].x[ply,19]+arx),trunc(h[cd].y[ply,19]));
line(trunc(h[cd].x[ply,10]+arx),trunc(h[cd].y[ply,10]),trunc(h[cd].x[ply,19]+arx),trunc(h[cd].y[ply,19]));
line(trunc(h[cd].x[ply,10]+arx),trunc(h[cd].y[ply,10]),trunc(h[cd].x[ply,17]+arx),trunc(h[cd].y[ply,17]));
line(trunc(h[cd].x[ply,18]+arx),trunc(h[cd].y[ply,18]),trunc(h[cd].x[ply,13]+arx),trunc(h[cd].y[ply,13]));
line(trunc(h[cd].x[ply,15]+arx),trunc(h[cd].y[ply,15]),trunc(h[cd].x[ply,7]+arx),trunc(h[cd].y[ply,7]));
line(trunc(h[cd].x[ply,16]+arx),trunc(h[cd].y[ply,16]),trunc(h[cd].x[ply,11]+arx),trunc(h[cd].y[ply,11]));
line(trunc(h[cd].x[ply,6]+arx),trunc(h[cd].y[ply,6]),trunc(h[cd].x[ply,11]+arx),trunc(h[cd].y[ply,11]));
line(trunc(h[cd].x[ply,6]+arx),trunc(h[cd].y[ply,6]),trunc(h[cd].x[ply,5]+arx),trunc(h[cd].y[ply,5]));
line(trunc(h[cd].x[ply,5]+arx),trunc(h[cd].y[ply,5]),trunc(h[cd].x[ply,13]+arx),trunc(h[cd].y[ply,13]));
line(trunc(h[cd].x[ply,2]+arx),trunc(h[cd].y[ply,2]),trunc(h[cd].x[ply,1]+arx),trunc(h[cd].y[ply,1]));
line(trunc(h[cd].x[ply,16]+arx),trunc(h[cd].y[ply,16]),trunc(h[cd].x[ply,9]+arx),trunc(h[cd].y[ply,9]));
line(trunc(h[cd].x[ply,3]+arx),trunc(h[cd].y[ply,3]),trunc(h[cd].x[ply,4]+arx),trunc(h[cd].y[ply,4]));
e:=trunc(h[cd].x[ply,12]+arx);
arc(e,trunc(h[cd].y[ply,12]),trunc(-h[cd].k[ply]*h[cd].suunta+540),trunc(-h[cd].k[ply]*h[cd].suunta+720),trunc(koko10));
end;
{*************************** Helikopterin piirto poisto *********************}
procedure kummaus;
begin
setcolor(0);
c:=d mod 2 +1;
if h[d].rx[2]<>0 then
piirto(2,c,0,h[d].rx[2]+(c-1)*323);
piirto(2,d,0,(d-1)*323);
end;
{*************************** R„j„hdys ***************************************}
procedure rajahdys;
begin
kummaus;
{RŽJŽHDYS}
h[d].x[1,0]:=h[d].x[1,a];
h[d].y[1,0]:=h[d].y[1,a];
h[d].x[1,1]:=h[d].x[1,0]-50+random(10);
sx:=trunc((h[d].hx[1]+h[d].x[1,1])/ktark);
kulmakartta:=(map[sx+1]-map[sx])/ktark;
karttaero:=(h[d].hx[1]+h[d].x[1,1])-sx*ktark;
h[d].y[1,1]:=map[sx]+trunc(karttaero*kulmakartta);
h[d].x[1,8]:=h[d].x[1,0]-random(10)+50;
sx:=trunc((h[d].hx[1]+h[d].x[1,8])/ktark);
kulmakartta:=(map[sx+1]-map[sx])/ktark;
karttaero:=(h[d].hx[1]+h[d].x[1,8])-sx*ktark;
h[d].y[1,8]:=map[sx]+trunc(karttaero*kulmakartta);
for b:=1 to 30 do begin
h[d].x[1,2]:=h[d].x[1,0]-80+random(10);
h[d].y[1,2]:=h[d].y[1,0]-50+random(10);
h[d].x[1,3]:=h[d].x[1,0]-30+random(10);
h[d].y[1,3]:=h[d].y[1,0]-30+random(10);
h[d].x[1,4]:=h[d].x[1,0]-80+random(10);
h[d].y[1,4]:=h[d].y[1,0]-80+random(10);
h[d].x[1,5]:=h[d].x[1,0]-20+random(10);
h[d].y[1,5]:=h[d].y[1,0]-40+random(10);
h[d].x[1,6]:=h[d].x[1,0]-25+random(10);
h[d].y[1,6]:=h[d].y[1,0]-90+random(10);
h[d].x[1,7]:=h[d].x[1,0] -5+random(10);
h[d].y[1,7]:=h[d].y[1,0]-50+random(10);
h[d].x[1,8]:=h[d].x[1,0]+25-random(10);
h[d].y[1,8]:=h[d].y[1,0]-90+random(10);
h[d].x[1,9]:=h[d].x[1,0]+20-random(10);
h[d].y[1,9]:=h[d].y[1,0]-40+random(10);
h[d].x[1,10]:=h[d].x[1,0]+80-random(10);
h[d].y[1,10]:=h[d].y[1,0]-80+random(10);
h[d].x[1,11]:=h[d].x[1,0]+30-random(10);
h[d].y[1,11]:=h[d].y[1,0]-30+random(10);
h[d].x[1,12]:=h[d].x[1,0]+80-random(10);
h[d].y[1,12]:=h[d].y[1,0]-50+random(10);
setcolor(15);
for a:=1 to 12 do
line(trunc(h[d].x[1,a]),trunc(h[d].y[1,a]),trunc(h[d].x[1,a+1]),trunc(h[d].y[1,a+1]));
{_maalaa(trunc(h[d].x[1,0]),trunc(h[d].y[1,0])-10,4,15); }
delay(500);
sound(random(100));
setcolor(0);
{_maalaa(trunc(h[d].x[1,0]),trunc(h[d].y[1,0])-10,0,15);}
for a:=1 to 12 do
line(trunc(h[d].x[1,a]),trunc(h[d].y[1,a]),trunc(h[d].x[1,a+1]),trunc(h[d].y[1,a+1]));
end;
nosound;
end;
begin
randomize;
grafiikkatilaan;
h[1].nap[1]:='a'; h[2].nap[1]:='8';
h[1].nap[2]:='z'; h[2].nap[2]:='2';
h[1].nap[3]:='x'; h[2].nap[3]:='4';
h[1].nap[4]:='c'; h[2].nap[4]:='5';
h[1].nap[5]:='v'; h[2].nap[5]:='6';
h[1].nap[6]:=_space; h[2].nap[6]:=_ret;
t:=0;t2:=0;
merkki:='i';
kartansuunnittelu;
poyta;
for d:=1 to 2 do
alkutiedot;
{delay(5000);}
{*************************** Pelin kierto *********************************}
repeat
{putpixel(x,y,0);luehiiri(x,y,status);putpixel(x,y,15);}
t:=t mod 200 + 1; {Kuin monta kuvaa piirt„m„tt„}
{************************* N„pp„imet ************************************}
if keypressed then begin
merkki:=readkey;
for d:=1 to 2 do begin
if h[d].loser<11 then begin
{********************* Kaasu + **************************************}
if merkki=h[d].nap[1] then begin
if (trunc(h[d].vk)>-maxkaasu) then begin
h[d].vk:=h[d].vk-2;
if h[d].vtuki<>0 then h[d].vtuki:=0;
_tayttovari(2);
if h[d].vk>-11 then _tayttovari(14);
if h[d].vk>-6 then _tayttovari(4);
bar(40-trunc(h[d].vk*5)+319*(d-1),451,48-trunc(h[d].vk*5)+319*(d-1),462);
end;
end;
{********************* Kaasu - **************************************}
if merkki=h[d].nap[2] then begin
if (trunc(h[d].vk)<0) then begin
h[d].vk:=h[d].vk+2;
_tayttovari(0);
bar(50-trunc(h[d].vk*5)+319*(d-1),451,58-trunc(h[d].vk*5)+319*(d-1),462);
end;
end;
{********************* K„„ntyminen - ********************************}
if (merkki=h[d].nap[3]) and (h[d].vtuki=0) then begin
h[d].k[1]:=h[d].k[1]-aste*h[d].suunta;
if h[d].k[1]<0 then h[d].k[1]:=h[d].k[1]+360;
if h[d].k[1]>360 then h[d].k[1]:=h[d].k[1]-360;
end;
{******************** Ymp„ri k„„ntyminen ***************************}
if (merkki=h[d].nap[4]) and (h[d].vtuki=0) then begin
if h[d].ka=0 then begin
setcolor(0);
if h[d].rx[2]<>0 then
piirto(2,d,0,-h[d].rx[2]+(d-1)*323);
piirto(2,d,0,(d-1)*323);
if h[d].suunta=1 then h[d].suunta:=-1 else h[d].suunta:=1;
end
else h[d].ka:=0;
end;
{********************* K„„ntyminen + ********************************}
if (merkki=h[d].nap[5]) and (h[d].vtuki=0) then begin
h[d].k[1]:=h[d].k[1]+aste*h[d].suunta;
if h[d].k[1]<0 then h[d].k[1]:=h[d].k[1]+360;
if h[d].k[1]>360 then h[d].k[1]:=h[d].k[1]-360;
end;
{********************* Ampuminen ************************************}
if (merkki=h[d].nap[6]) then begin
if h[d].ampua=0 then
h[d].ampua:=h[d].ampua+panosper
else h[d].ampua:=0;
end;
end;
end;
end;
{************************* Luodin l„ht”arvot ****************************}
if t mod 20=0 then
for d:=1 to 2 do
if h[d].ampua<>0 then begin
h[d].luoti:=h[d].luoti mod panoksia + 1;
if (h[d].py[1,h[d].luoti])=500 then begin
h[d].ampua:=h[d].ampua-1;
h[d].px[1,h[d].luoti]:=h[d].hx[1]+h[d].x[1,2];
h[d].px[2,h[d].luoti]:=h[d].px[1,h[d].luoti]-h[d].hx[1];
h[d].py[1,h[d].luoti]:=h[d].y[1,2];
h[d].py[2,h[d].luoti]:=h[d].py[1,h[d].luoti];
h[d].ptx3[h[d].luoti]:=trunc(h[d].px[1,h[d].luoti]-h[d mod 2 + 1].hx[1]);
c:=90;
h[d].pvx[h[d].luoti]:=h[d].suunta*kosi(h[d].k[1]+c)*panosnopeus/(1+random(10)/40);
h[d].pvy[h[d].luoti]:=sini(h[d].k[1]+c)*panosnopeus/(1+random(10)/40);
h[d].panosmatka[h[d].luoti]:=panoskantama;
end;
end;
{************************* t ****************************************}
if (t mod 100=0) then begin
t2:=t2 mod tykkeja +1;
if (ty[t2].matka=0) and (ty[t2].energy>0) then begin
ty[t2].aste:=sqrt(sqr(ty[1].y-1-h[ty[t2].kohde].y[1,0])+sqr(ty[t2].hx-h[ty[t2].kohde].hx[1]));
if (ty[t2].aste<250) then begin
ty[t2].aste:=(ty[t2].y-1-h[ty[t2].kohde].y[1,0])/(ty[t2].hx-h[ty[t2].kohde].hx[1]);
ty[t2].pvx:=-(ty[t2].hx-h[ty[t2].kohde].hx[1])/100;
ty[t2].pvy:=ty[t2].pvx*ty[t2].aste;
ty[t2].aste:=tyluotiv/(sqrt(sqr(ty[t2].pvx)+sqr(ty[t2].pvy)));
ty[t2].pvx:=ty[t2].pvx*ty[t2].aste;
ty[t2].pvy:=ty[t2].pvy*ty[t2].aste;
ty[t2].px[1]:=ty[t2].hx+(koko20/tyluotiv)*ty[t2].pvx;
ty[t2].px[2]:=ty[t2].px[1];
ty[t2].py[1]:=ty[t2].y-1+(koko20/tyluotiv)*ty[t2].pvy;
ty[t2].py[2]:=ty[t2].py[1];
ty[t2].matka:=150;
end;
end;
end;
for e:=1 to tykkeja do
if ty[e].matka<>0 then begin
ty[e].px[1]:=ty[e].px[1]+ty[e].pvx;
ty[e].py[1]:=ty[e].py[1]+ty[e].pvy;
ty[e].matka:=ty[e].matka-1;
for d:=1 to 2 do begin
if (sqrt(sqr(ty[e].px[1]-h[d].hx[1])+sqr(ty[e].py[1]-h[d].y[1,0]))<koko15) then begin
sound(300);
delay(1);
nosound;
delay(1);
_tayttovari(8);
bar(215+h[d].energy*5+319*(d-1),451,218+h[d].energy*5+319*(d-1),462);
h[d].energy:=h[d].energy-1;
if h[d].energy=0 then begin
bar(215+h[d].energy*5+319*(d-1),451,218+h[d].energy*5+319*(d-1),462);
{setcolor(6);
circle(trunc(xx[1,d,0]),trunc(h[d].y[1,0]),70);
_maalaa(trunc(xx[1,d,0]),trunc(h[d].y[1,0]),14,6);}
h[d].loser:=11;
h[d].vk:=0;
end;
if h[d].energy<=10 then begin
h[d].loser:=11-h[d].energy
end;
if h[d].vtuki<>0 then h[d].vtuki:=0;
h[d].vx:=h[d].vx+ty[e].pvx/panoskimpo;
h[d].vy:=h[d].vy+ty[e].pvy/panoskimpo;
ty[e].matka:=0;
end;
end;
for d:=1 to 2 do begin
if (abs(ty[e].ptx3[d])<=157) then
putpixel(trunc(ty[e].ptx3[d]+158+323*(d-1)),trunc(ty[e].py[2]),0);
if (abs(ty[e].px[1]-h[d].hx[1])<=157) and (ty[e].matka>0) then
putpixel(trunc(ty[e].px[1]-h[d].hx[1]+158+323*(d-1)),trunc(ty[e].py[1]),13+ty[e].puoli);
end;
for d:=1 to 2 do begin
ty[e].px[2]:=ty[e].px[1]-h[d].hx[1];
ty[e].ptx3[d]:=ty[e].px[2];
end;
ty[e].py[2]:=ty[e].py[1];
end;
{************************* Hidastaja jos ei panoksia ********************}
for d:=1 to 2 do
if h[d].ampua=0 then delay(5);
{************************* Panoksia liikkuu *****************************}
for a:=1 to panoksia do
for d:=1 to 2 do
if h[d].py[1,a]<500 then begin
h[d].px[1,a]:=h[d].px[1,a]+h[d].pvx[a];
h[d].py[1,a]:=h[d].py[1,a]+h[d].pvy[a];
h[d].panosmatka[a]:=h[d].panosmatka[a]-1;
{panos katoo}
if h[d].panosmatka[a]=0 then
h[d].py[1,a]:=500;
sx:=trunc((h[d].px[1,a]+158)/ktark);
karttaero:=h[d].px[1,a]+158-sx*ktark;
if sx<1 then sx:=1;
if sx>=kartankoko then sx:=sx mod 2 + kartankoko-2;
kulmakartta:=-(map[sx]-map[sx+1])/ktark;
maah[0]:=map[sx]+trunc(karttaero*kulmakartta);
if (maah[0]<h[d].py[1,a]) then
h[d].py[1,a]:=500;
if (trunc(h[d].px[1,a]-h[d].hx[1])<=315) and (trunc(h[d].px[1,a]-h[d].hx[1])>=1)then
putpixel(trunc(h[d].px[1,a]-h[d].hx[1])+323*(d-1),trunc(h[d].py[1,a]),13+d);
if (trunc(h[d].px[2,a])<=315) and (trunc(h[d].px[2,a])>=1) then
putpixel(trunc(h[d].px[2,a])+323*(d-1),trunc(h[d].py[2,a]),0);
{toisen kuvaruutu panokset}
c:=d mod 2 +1;
if (sqrt(sqr(h[d].px[1,a]-h[c].hx[1]-158)+sqr(h[d].py[1,a]-h[c].y[1,0]))<koko15) then begin
sound(300);
delay(1);
nosound;
delay(1);
h[d].panosmatka[a]:=1;
_tayttovari(8);
bar(215+h[c].energy*5+319*(c-1),451,218+h[c].energy*5+319*(c-1),462);
h[c].energy:=h[c].energy-1;
if h[c].energy=0 then begin
bar(215+h[c].energy*5+319*(c-1),451,218+h[c].energy*5+319*(c-1),462);
{setcolor(6);
circle(trunc(xx[1,c,0]),trunc(h[c].y[1,0]),70);
_maalaa(trunc(xx[1,c,0]),trunc(h[c].y[1,0]),14,6);}
h[c].loser:=11;
h[c].vk:=0;
end;
if h[c].energy<=10 then begin
h[c].loser:=11-h[c].energy
end;
if h[c].vtuki<>0 then h[c].vtuki:=0;
h[c].vx:=h[c].vx+h[d].pvx[a]/panoskimpo;
h[c].vy:=h[c].vy+h[d].pvy[a]/panoskimpo;
end;
for e:=1 to tykkeja do
if ty[e].energy>0 then
if (sqrt(sqr(h[d].px[1,a]-ty[e].hx-158)+sqr(h[d].py[1,a]-ty[e].y))<koko20) then begin
sound(400);
delay(1);
nosound;
delay(1);
h[d].panosmatka[a]:=1;
ty[e].energy:=ty[e].energy-1;
if ty[e].energy=0 then begin
ty[e].energy:=-20;
end;
end;
if (trunc(h[d].px[1,a]-h[c].hx[1])<=315) and (trunc(h[d].px[1,a]-h[c].hx[1])>=1) then
putpixel(trunc(h[d].px[1,a]-h[c].hx[1]+323*(2-d)),trunc(h[d].py[1,a]),13+d);
if (trunc(h[d].ptx3[a])<=315) and (trunc(h[d].ptx3[a])>=1) then
putpixel(h[d].ptx3[a]+323*(2-d),trunc(h[d].py[2,a]),0);
h[d].ptx3[a]:=trunc(h[d].px[1,a]-h[c].hx[1]);
h[d].px[2,a]:=h[d].px[1,a]-h[d].hx[1]; h[d].py[2,a]:=h[d].py[1,a];
end;
{if t mod 20=1 then begin
_tayttovari(0);
bar(1,1,100,30);
setcolor(15);
d:=1;
_kirjoitadesluku(2,2,4,4,ty[1].kory[1]);
_kirjoitadesluku(2,12,4,4,-random(3)+1);
end;}
{************************* K„„nt„j„ *************************************}
if (t mod 20 = 15) then
for d:=1 to 2 do
if (h[d].loser>=11) then begin
a:=-random(3)+1;
h[d].k[1]:=h[d].k[1]+h[d].suunta*aste*a;
if h[d].k[1]<0 then h[d].k[1]:=h[d].k[1]+360;
if h[d].k[1]>360 then h[d].k[1]:=h[d].k[1]-360;
end;
{************************* Vauhdit & Paikkakordinaatit ******************}
for d:=1 to 2 do begin
h[d].v:=h[d].vk/sca;
h[d].vy:=h[d].vy+sini(h[d].k[1])*h[d].v+g/sca-h[d].vtuki;
h[d].vx:=h[d].vx+kosi(h[d].k[1])*h[d].v*h[d].suunta;
{ILMANVASTUS}
h[d].vy:=h[d].vy/ilmanvastus;
h[d].vx:=h[d].vx/ilmanvastus;
h[d].hx[1]:=h[d].hx[1]+h[d].vx;
h[d].kx[1]:=trunc((h[d].hx[1]+h[d].x[1,0]+1)/ktark);
end;
{************************************************************************}
for d:=1 to 2 do
helkkarinkoordinaatit2;
{************************* Kattoon lento ********************************}
if (t=3) then
for d:=1 to 2 do
if (h[d].y[1,0]<koko10) and (h[d].vk<>0) then begin
_tayttovari(0);
bar(50+319*(d-1),451,48-trunc(h[d].vk*5)+319*(d-1),462);
h[d].vk:=0;
end;
{************************* Maahan t”rm„„minen ***************************}
for d:=1 to 2 do begin
for a:=1 to 6 do begin
karttaero:=h[d].kx[1]*ktark-h[d].hx[1]-158;
c:=0;
repeat
c:=c+1;
karttaero:=karttaero+ktark;
until karttaero+ktark>=h[d].x[1,a];
sx:=h[d].kx[1]+c;
if sx<1 then sx:=1;
if sx>=kartankoko then sx:=sx mod 2 + kartankoko-2;
kulmakartta:=-(map[sx]-map[sx+1])/ktark;
karttaero:=-((h[d].kx[1]+c)*ktark-h[d].hx[1]-158-h[d].x[1,a]);
maah[a]:=map[sx]+round(karttaero*kulmakartta);
{
setcolor(0);
if (d=2) and (a=6) then line(trunc(h[d].x[2,a]+323*(d-1)),447,trunc(h[d].x[2,a]+323*(d-1)),260);
setcolor(15);
if (d=2) and (a=6) then line(trunc(h[d].x[1,a]+323*(d-1)),447,trunc(h[d].x[1,a]+323*(d-1)),maah[0]);
}
end;
for a:=1 to 6 do
if h[d].y[1,a]>maah[a] then begin
{** laskeutuminen **}
if (maah[1]<443) and (h[d].vy<0.2) and (abs(maah[1]-maah[2])<1) and (a<3) and (h[d].k[1]>80) and (h[d].k[1]<110) then begin
h[d].y[1,0]:=maah[1]-koko15-1;
h[d].k[1]:=90;
h[d].ka:=0;
h[d].vtuki:=(h[d].vk+g)/sca;
if h[d].vtuki<0 then h[d].vtuki:=0;
h[d].v:=h[d].vk/sca;
h[d].vy:=0;
h[d].vx:=0;
helkkarinkoordinaatit2;
helkkarinkoordinaatit;
end
else h[d].loser:=100;
end;
end;
{************************* Kummaus **************************************}
if t mod 20=0 then begin
for d:=1 to 2 do
helkkarinkoordinaatit;
for d:=1 to 2 do
kummaus;
setcolor(0);
maapiirto(2); {maa}
end;
{************************* Piirto Maa & Helik. **************************}
if t mod 20=0 then begin
setcolor(15);
for d:=1 to 2 do begin
c:=d mod 2 +1;
if abs(h[d].hx[1]-h[c].hx[1])<157-koko40 then begin
h[d].rx[1]:=h[c].hx[1]-h[d].hx[1]-323*(c-d);
piirto(1,c,c+13,h[d].rx[1]+(c-1)*323);
end
else h[d].rx[1]:=0;
h[d].rx[2]:=h[d].rx[1];
piirto(1,d,d+13,(d-1)*323);
h[d].pro:=h[d].pro+h[d].prok*trunc(-h[d].vk/2);
if h[d].pro>25 then h[d].pro:=25;
if h[d].pro<0 then h[d].pro:=0;
if h[d].pro=25 then h[d].prok:=-1;
if h[d].pro=0 then h[d].prok:=1;
end;
{maa}
setcolor(2);
maapiirto(1);
for a:=1 to 2 do begin
for d:=1 to 2 do
if (h[d].kx[2]<kartankoko-1) and (h[d].y[2,0]>0) then
putpixel(160+319*(a-1)+trunc((h[d].hx[2]+316)*bb/ktark-bb),aaa+trunc(h[d].y[2,0]*aa+aa),0);
for d:=1 to 2 do
if (h[d].kx[1]<kartankoko-1) and (h[d].y[1,0]>0) then
putpixel(160+319*(a-1)+trunc((h[d].hx[1]+316)*bb/ktark-bb),aaa+trunc(h[d].y[1,0]*aa+aa),13+d);
end;
{savu}
{ if h[d].loser>0 then
for a:=1 to h[d].loser do
}
for d:=1 to 2 do begin
for a:=0 to 19 do begin
h[d].x[2,a]:=h[d].x[1,a];
h[d].y[2,a]:=h[d].y[1,a];
end;
h[d].hx[2]:=h[d].hx[1];
h[d].k[2]:=h[d].k[1];
h[d].kx[2]:=h[d].kx[1];
end;
end;
{************************* Kuoleminen ***********************************}
for d:=1 to 2 do
if h[d].loser=100 then begin
{rajahdys;}
{if h[d].loser=100 then d:=d mod 2 +1;}
if h[d].rx[2]<>0 then
piirto(2,d,0,-h[d].rx[2]+(d-1)*323);
{setcolor(12);
outtextXY(10,235,'Winner: PLAYER');
_kirjoitakokluku(380,235,1,d);
delay(20000);}
_tayttovari(0);
bar(1+323*(d-1),0,315+323*(d-1),vesi);
bar(50+319*(d-1),451,48-trunc(h[d].vk*5)+319*(d-1),462);
alkutiedot; {Energia loppu PS. kato yl”s}
end;
until merkki=_esc;
end.
HELI3.PAS - Latest version
Some improvements, e.g. start screen with action key selection and more enemy cannons, which make game even slower. ALOITUS.PAS combined to the game.
program lenokone;
uses crt,graph,grafiikka;
const
helikopterisuhde=2;
kartankoko=90;
ktark=50;
panoskimpo=60;
panosper=2;
korkeusvaihtelu=60;
ilmanvastus=1.0013;
aste=11.25/2;
maxkaasu=20;
korkeinvuori=200;
g=10; {painovoima}
tykkeja=8;
panoksia=10;
panosnopeus=2;
tyluotiv=1.5;
panoskantama=500;
sca=50000; {nopeuksien sek„ painovoiman skaala}
koko10=10/helikopterisuhde; koko15=15/helikopterisuhde;
koko20=20/helikopterisuhde; koko7=7/helikopterisuhde;
koko40=40/helikopterisuhde; koko23=23/helikopterisuhde;
koko25=25/helikopterisuhde; koko17=17/helikopterisuhde;
vesi=427;
aaa=vesi+3;
aa=17/vesi;bb=160/kartankoko;
type
TykkiPoint = record
X, Y,hx: integer;
kory: array[1..2] of integer;
py: array[1..2] of real;
px: array[1..2] of real;
ptx3: array[1..2] of real;
pvx,pvy,aste:real;
matka,puoli:byte;
kohde,energy:shortint;
end;
HeliPoint = Record
x: array[1..2,0..19] of real;
y: array[1..2,0..19] of real;
hx: array[1..2] of real;
kx: array[1..2] of integer;
rx: array[1..2] of real;
v,vy,vx,vtuki: real; {nopeudet}
vk: shortint;
k: array[1..2] of real;
suunta: shortint;
ka: real;
nap: array[1..7] of char;
pro,prok: shortint; {Propellin asento sek„ suunta}
loser,energy: shortint;
ampua: integer;
luoti: shortint;
pvx,pvy: array[1..panoksia] of real;
px,py: array[1..2,1..panoksia] of real;
ptx3: array[1..panoksia] of integer;
panosmatka: array[1..panoksia] of integer;
aloitusx,aloituskx,aloitusy: integer;
savu: array[1..2,1..11] of integer;
end;
var
{x,y,status:integer;}
kulmakartta,karttaero: real;
t,t2,a,b,c,d,e,q,sx:integer;
merkki:char;
map: array[1..kartankoko] of integer;{Karttatiedot-korkeus}
mapt: array[1..kartankoko] of shortint;{Karttatiedot-tyyppi}
maah: array[0..6] of integer;
vaih: array[0..4] of string;
na: array[1..7] of string;
ty: array[1..tykkeja] of TykkiPoint;
h: array[1..2] of HeliPoint;
{*************************** Kartansuunnittelu ******************************}
procedure kartansuunnittelu;
begin
sx:=trunc(320/ktark);
map[1]:=10;
for a:=2 to kartankoko do begin
if map[a-1]>vesi-4 then begin
b:=random(5);
if b=0 then
map[a]:=map[a-1]-korkeusvaihtelu-random(korkeusvaihtelu*2)
else
if map[a-1]=vesi then map[a]:=vesi-2 else map[a]:=vesi;
end
else map[a]:=map[a-1]+korkeusvaihtelu-random(korkeusvaihtelu*2);
if map[a]<korkeinvuori then map[a]:=map[a]+korkeusvaihtelu-random(10);
if map[a]>vesi+1 then map[a]:=map[a]-korkeusvaihtelu-random(trunc(korkeusvaihtelu/3));
if (map[a-1]>vesi-4) and (map[a]>vesi-4) then mapt[a-1]:=2 else mapt[a-1]:=1;
end;
mapt[sx-2]:=1;
map[sx-1]:=-50; mapt[sx-1]:=1;
map[sx]:=-50; mapt[sx]:=1;
h[1].aloituskx:=sx+4;
h[2].aloituskx:=kartankoko-10;
map[kartankoko]:=vesi; mapt[kartankoko]:=2;
map[kartankoko-1]:=vesi-2; mapt[kartankoko-1]:=2;
map[kartankoko-2]:=vesi; mapt[kartankoko-2]:=2;
for d:=1 to 2 do begin
h[d].aloitusx:=round((h[d].aloituskx+0.5)*ktark)-316;
a:=round(10)+10;
map[h[d].aloituskx]:=map[h[d].aloituskx]-a;;
map[h[d].aloituskx+1]:=map[h[d].aloituskx];
h[d].aloitusy:=trunc(map[h[d].aloituskx]-koko15);
mapt[h[d].aloituskx-1]:=1;
mapt[h[d].aloituskx]:=3;
mapt[h[d].aloituskx+1]:=1;
end;
for d:=1 to tykkeja do begin
b:=round(kartankoko/2);
c:=0;
repeat
c:=c+1;
if d<=tykkeja/2 then a:=random(b-10)+5 else a:=b+random(b-10)+5;
if c>100 then halt(1);
until (mapt[a]=1) and (map[a]<map[a-1]) and (map[a]<map[a+1]);
mapt[a]:=d+10;
ty[d].x:=a;
ty[d].y:=map[ty[d].x];
kulmakartta:=-(map[ty[d].x]-map[ty[d].x-1])/ktark;
karttaero:=koko20;
ty[d].kory[1]:=ty[d].y+round(karttaero*kulmakartta);
kulmakartta:=(map[ty[d].x]-map[ty[d].x+1])/ktark;
karttaero:=koko20;
ty[d].kory[2]:=ty[d].y-round(karttaero*kulmakartta);
ty[d].px[1]:=0;
ty[d].py[1]:=0;
ty[d].px[2]:=0;
ty[d].py[2]:=0;
ty[d].pvx:=0;
ty[d].pvy:=0;
ty[d].aste:=0;
ty[d].matka:=0;
if d<=tykkeja/2 then ty[d].kohde:=2 else ty[d].kohde:=1;
if d<=tykkeja/2 then ty[d].puoli:=1 else ty[d].puoli:=2;
ty[d].energy:=10;
ty[d].hx:=ty[d].x*ktark-316;
end;
end;
{***************************** Helik. piirtokord. ***************************}
procedure helkkarinkoordinaatit;
var
c0,c90,s0,s90:real;
propelli:real;
begin
c0:=kosi(h[d].k[1])*h[d].suunta;
c90:=kosi(h[d].k[1]+90)*h[d].suunta;
s0:=sini(h[d].k[1]);
s90:=sini(h[d].k[1]+90);
propelli:=koko25-h[d].pro/helikopterisuhde;
h[d].x[1,16]:=h[d].x[1,0]+c0*koko10;
h[d].y[1,16]:=h[d].y[1,0]+s0*koko10;
h[d].x[1,14]:=h[d].x[1,16]+c90*koko10;
h[d].y[1,14]:=h[d].y[1,16]+s90*koko10;
h[d].x[1,12]:=h[d].x[1,0]+c90*koko10;
h[d].y[1,12]:=h[d].y[1,0]+s90*koko10;
h[d].x[1,18]:=h[d].x[1,14]-c0*koko20;
h[d].y[1,18]:=h[d].y[1,14]-s0*koko20;
h[d].x[1,15]:=h[d].x[1,0]-c0*koko15;
h[d].y[1,15]:=h[d].y[1,0]-s0*koko15;
h[d].x[1,19]:=h[d].x[1,15]+c90*koko7;
h[d].y[1,19]:=h[d].y[1,15]+s90*koko7;
h[d].x[1,10]:=h[d].x[1,15]-c90*koko7;
h[d].y[1,10]:=h[d].y[1,15]-s90*koko7;
h[d].x[1,17]:=h[d].x[1,18]-c90*koko20;
h[d].y[1,17]:=h[d].y[1,18]-s90*koko20;
h[d].x[1,13]:=h[d].x[1,18]-c90*koko40;
h[d].y[1,13]:=h[d].y[1,18]-s90*koko40;
h[d].x[1,11]:=h[d].x[1,0]-c90*koko17-c0*koko7;
h[d].y[1,11]:=h[d].y[1,0]-s90*koko17-s0*koko7;
h[d].x[1,9]:=h[d].x[1,0]+c0*koko15;
h[d].y[1,9]:=h[d].y[1,0]+s0*koko15;
h[d].x[1,8]:=h[d].x[1,9]+c90*koko10;
h[d].y[1,8]:=h[d].y[1,9]+s90*koko10;
end;
procedure helkkarinkoordinaatit2;
var
c0,c90,s0,s90:real;
propelli:real;
begin
c0:=kosi(h[d].k[1])*h[d].suunta;
c90:=kosi(h[d].k[1]+90)*h[d].suunta;
s0:=sini(h[d].k[1]);
s90:=sini(h[d].k[1]+90);
propelli:=koko25-h[d].pro/helikopterisuhde;
{h[d].x[1,0]:=h[d].x[1,0];}
h[d].y[1,0]:=h[d].y[1,0]+h[d].vy;
h[d].x[1,1]:=h[d].x[1,0]-c90*koko10+c0*koko15;
h[d].y[1,1]:=h[d].y[1,0]-s90*koko10+s0*koko15;
h[d].x[1,2]:=h[d].x[1,1]+c90*(koko20+koko10);
h[d].y[1,2]:=h[d].y[1,1]+s90*(koko20+koko10);
h[d].x[1,7]:=h[d].x[1,0]-c0*koko20;
h[d].y[1,7]:=h[d].y[1,0]-s0*koko20;
h[d].x[1,3]:=h[d].x[1,7]+c90*propelli;
h[d].y[1,3]:=h[d].y[1,7]+s90*propelli;
h[d].x[1,4]:=h[d].x[1,7]-c90*propelli;
h[d].y[1,4]:=h[d].y[1,7]-s90*propelli;
h[d].x[1,6]:=h[d].x[1,0]-c90*koko17-c0*koko7-c90*koko23;
h[d].y[1,6]:=h[d].y[1,0]-s90*koko17-s0*koko7-s90*koko23;
h[d].x[1,5]:=h[d].x[1,6]-c0*koko10;
h[d].y[1,5]:=h[d].y[1,6]-s0*koko10;
end;
procedure poyta;
begin
setcolor(15);
cleardevice;
line(0,0,0,479);
line(639,0,639,479);
line(323,0,323,vesi+2);
line(316,0,316,vesi+2);
line(0,vesi+2,316,vesi+2);
line(323,vesi+2,639,vesi+2);
line(0,479,639,479);
line(0,aaa+19,639,aaa+19);
line(0,aaa+34,639,aaa+34);
line(320,479,320,vesi+2);
line(317,vesi+2,322,vesi+2);
line(159,vesi+2,159,aaa+19);
line(479,vesi+2,479,aaa+19);
outtextXY(2,453,'Kaasu:');
outtextXY(322,453,'Kaasu:');
end;
{*************************** Kuoleman j„lkeiset tiedot **********************}
procedure alkutiedot;
begin
h[d].suunta:=d*2-3;
h[d].energy:=20;
h[d].x[1,0]:=158;
h[d].y[1,0]:=h[d].aloitusy;
h[d].hx[1]:=h[d].aloitusx; h[d].hx[2]:=h[d].hx[1];
h[d].rx[1]:=0;
h[d].rx[2]:=0;
h[d].kx[1]:=trunc((h[d].hx[1]+h[d].x[1,0])/ktark);
h[d].kx[2]:=h[d].kx[1];
h[d].ampua:=0;
h[d].loser:=0;
h[d].k[1]:=90; h[d].k[2]:=90; h[d].ka:=0;
h[d].pro:=0; h[d].prok:=5;
h[d].luoti:=0;
for a:=1 to panoksia do
h[d].py[1,a]:=500;
h[d].vk:=0;
h[d].v:=0;
h[d].vtuki:=(h[d].vk+g)/sca;
h[d].vy:=h[d].vk/sca-h[d].vtuki;
h[d].vx:=0;
for a:=1 to h[d].energy do begin
if a<18 then _tayttovari(2);
if a<11 then _tayttovari(14);
if a<6 then _tayttovari(4);
bar(215+a*5+319*(d-1),451,218+a*5+319*(d-1),462);
end;
helkkarinkoordinaatit2;
helkkarinkoordinaatit;
setcolor(2);
for a:=2 to kartankoko do begin
if mapt[a-1]=2 then
setcolor(3)
else if mapt[a-1]=3 then
setcolor(7)
else setcolor(2);
line(160+320*(d-1)+trunc(a*bb-bb),vesi+4+trunc(map[a]*aa),160+320*(d-1)+trunc((a-1)*bb-bb),vesi+4+trunc(map[a-1]*aa));
end;
for a:=0 to 19 do begin
h[d].x[2,a]:=h[d].x[1,a];
h[d].y[2,a]:=h[d].y[1,a];
end;
a:=6;
end;
{*************************** Maan piirto peliss„ ****************************}
procedure maapiirto(yk:integer);
begin
for d:=1 to 2 do begin
sx:=h[d].kx[yk];
if h[d].kx[yk]>=kartankoko then sx:=h[d].kx[yk] mod 2 + kartankoko-2;
if (yk=1) then
if mapt[sx]=2 then
setcolor(3)
else if mapt[sx]=3 then
setcolor(7)
else setcolor(2);
kulmakartta:=(map[sx]-map[sx+1])/ktark;
karttaero:=h[d].kx[yk]*ktark-h[d].hx[yk]-158+ktark;
{ if d=1 then begin
_tayttovari(0);
bar(90,90,160,110);
_kirjoitadesluku(100,100,4,4,karttaero); end; }
c:=trunc(kulmakartta*karttaero+map[sx+1]);
line(165*(d-1)+158*(d-2)+trunc((h[d].kx[yk]+1)*ktark-h[d].hx[yk]),map[sx+1],323*(d-1)+1,c);
a:=h[d].kx[yk]+1;
repeat
sx:=a;
if a>=kartankoko then sx:=a mod 2 + kartankoko-2;
if (yk=1) then
if mapt[sx]=2 then
setcolor(3)
else if mapt[sx]=3 then
setcolor(7)
else setcolor(2);
line(trunc(a*ktark-h[d].hx[yk]+165*(d-1)+158*(d-2)),map[sx],trunc((a+1)*ktark-h[d].hx[yk])+165*(d-1)+158*(d-2),map[sx+1]);
a:=a+1;
until trunc((a+1)*ktark-h[d].hx[yk])>=474;
sx:=a;
if a>=kartankoko then sx:=a mod 2 + kartankoko-2;
if (yk=1) then
if mapt[sx]=2 then
setcolor(3)
else if mapt[sx]=3 then
setcolor(7)
else setcolor(2);
kulmakartta:=-(map[sx]-map[sx+1])/(ktark);
karttaero:=474-(a*ktark-h[d].hx[yk]);
c:=trunc(kulmakartta*(karttaero)+map[sx]);
line(trunc(a*ktark-h[d].hx[yk]+165*(d-1)+158*(d-2)),map[sx],323*(d-1)+315,c);
for a:=1 to tykkeja do begin
if (yk=1) then setcolor(13+ty[a].puoli);
c:=trunc(ty[a].hx-h[d].hx[yk]);
if (c>koko20-158) and (c<316-koko20-158) then begin
line(trunc(c-koko20)+158+323*(d-1),ty[a].y-1,trunc(c-koko20)+158+323*(d-1),ty[a].kory[1]);
line(trunc(c+koko20)+158+323*(d-1),ty[a].y-1,trunc(c+koko20)+158+323*(d-1),ty[a].kory[2]);
line(trunc(c-koko20)+158+323*(d-1),ty[a].y-1,trunc(c+koko20)+158+323*(d-1),ty[a].y-1);
if ty[a].energy>0 then
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc(koko20))
else if ty[a].energy<0 then begin
sound(200-ty[a].energy*20);
if (yk=1) then setcolor(12);
if yk=1 then
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc(-ty[a].energy/helikopterisuhde))
else
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc((1-ty[a].energy)/helikopterisuhde));
if yk=1 then ty[a].energy:=ty[a].energy+1;
if ty[a].energy=0 then begin
setcolor(0);
arc(trunc(c)+158+323*(d-1),ty[a].y-2,0,180,trunc(1/helikopterisuhde));
nosound;
end;
{delay(1000);}
end;
end;
end;
end;
end;
{*************************** Helikopterin piirto peliss„ ********************}
procedure piirto(ply,cd,vari:integer;arx:real);
begin
setcolor(vari);
line(trunc(h[cd].x[ply,16]+arx),trunc(h[cd].y[ply,16]),trunc(h[cd].x[ply,14]+arx),trunc(h[cd].y[ply,14]));
line(trunc(h[cd].x[ply,18]+arx),trunc(h[cd].y[ply,18]),trunc(h[cd].x[ply,8]+arx),trunc(h[cd].y[ply,8]));
line(trunc(h[cd].x[ply,18]+arx),trunc(h[cd].y[ply,18]),trunc(h[cd].x[ply,19]+arx),trunc(h[cd].y[ply,19]));
line(trunc(h[cd].x[ply,10]+arx),trunc(h[cd].y[ply,10]),trunc(h[cd].x[ply,19]+arx),trunc(h[cd].y[ply,19]));
line(trunc(h[cd].x[ply,10]+arx),trunc(h[cd].y[ply,10]),trunc(h[cd].x[ply,17]+arx),trunc(h[cd].y[ply,17]));
line(trunc(h[cd].x[ply,18]+arx),trunc(h[cd].y[ply,18]),trunc(h[cd].x[ply,13]+arx),trunc(h[cd].y[ply,13]));
line(trunc(h[cd].x[ply,15]+arx),trunc(h[cd].y[ply,15]),trunc(h[cd].x[ply,7]+arx),trunc(h[cd].y[ply,7]));
line(trunc(h[cd].x[ply,16]+arx),trunc(h[cd].y[ply,16]),trunc(h[cd].x[ply,11]+arx),trunc(h[cd].y[ply,11]));
line(trunc(h[cd].x[ply,6]+arx),trunc(h[cd].y[ply,6]),trunc(h[cd].x[ply,11]+arx),trunc(h[cd].y[ply,11]));
line(trunc(h[cd].x[ply,6]+arx),trunc(h[cd].y[ply,6]),trunc(h[cd].x[ply,5]+arx),trunc(h[cd].y[ply,5]));
line(trunc(h[cd].x[ply,5]+arx),trunc(h[cd].y[ply,5]),trunc(h[cd].x[ply,13]+arx),trunc(h[cd].y[ply,13]));
line(trunc(h[cd].x[ply,2]+arx),trunc(h[cd].y[ply,2]),trunc(h[cd].x[ply,1]+arx),trunc(h[cd].y[ply,1]));
line(trunc(h[cd].x[ply,16]+arx),trunc(h[cd].y[ply,16]),trunc(h[cd].x[ply,9]+arx),trunc(h[cd].y[ply,9]));
line(trunc(h[cd].x[ply,3]+arx),trunc(h[cd].y[ply,3]),trunc(h[cd].x[ply,4]+arx),trunc(h[cd].y[ply,4]));
e:=trunc(h[cd].x[ply,12]+arx);
arc(e,trunc(h[cd].y[ply,12]),trunc(-h[cd].k[ply]*h[cd].suunta+540),trunc(-h[cd].k[ply]*h[cd].suunta+720),trunc(koko10));
end;
{*************************** Helikopterin piirto poisto *********************}
procedure kummaus;
begin
setcolor(0);
c:=d mod 2 +1;
if h[d].rx[2]<>0 then
piirto(2,c,0,h[d].rx[2]+(c-1)*323);
piirto(2,d,0,(d-1)*323);
end;
{*************************** R„j„hdys ***************************************}
procedure rajahdys;
begin
kummaus;
{RŽJŽHDYS}
h[d].x[1,0]:=h[d].x[1,a];
h[d].y[1,0]:=h[d].y[1,a];
h[d].x[1,1]:=h[d].x[1,0]-50+random(10);
sx:=trunc((h[d].hx[1]+h[d].x[1,1])/ktark);
kulmakartta:=(map[sx+1]-map[sx])/ktark;
karttaero:=(h[d].hx[1]+h[d].x[1,1])-sx*ktark;
h[d].y[1,1]:=map[sx]+trunc(karttaero*kulmakartta);
h[d].x[1,8]:=h[d].x[1,0]-random(10)+50;
sx:=trunc((h[d].hx[1]+h[d].x[1,8])/ktark);
kulmakartta:=(map[sx+1]-map[sx])/ktark;
karttaero:=(h[d].hx[1]+h[d].x[1,8])-sx*ktark;
h[d].y[1,8]:=map[sx]+trunc(karttaero*kulmakartta);
for b:=1 to 30 do begin
h[d].x[1,2]:=h[d].x[1,0]-80+random(10);
h[d].y[1,2]:=h[d].y[1,0]-50+random(10);
h[d].x[1,3]:=h[d].x[1,0]-30+random(10);
h[d].y[1,3]:=h[d].y[1,0]-30+random(10);
h[d].x[1,4]:=h[d].x[1,0]-80+random(10);
h[d].y[1,4]:=h[d].y[1,0]-80+random(10);
h[d].x[1,5]:=h[d].x[1,0]-20+random(10);
h[d].y[1,5]:=h[d].y[1,0]-40+random(10);
h[d].x[1,6]:=h[d].x[1,0]-25+random(10);
h[d].y[1,6]:=h[d].y[1,0]-90+random(10);
h[d].x[1,7]:=h[d].x[1,0] -5+random(10);
h[d].y[1,7]:=h[d].y[1,0]-50+random(10);
h[d].x[1,8]:=h[d].x[1,0]+25-random(10);
h[d].y[1,8]:=h[d].y[1,0]-90+random(10);
h[d].x[1,9]:=h[d].x[1,0]+20-random(10);
h[d].y[1,9]:=h[d].y[1,0]-40+random(10);
h[d].x[1,10]:=h[d].x[1,0]+80-random(10);
h[d].y[1,10]:=h[d].y[1,0]-80+random(10);
h[d].x[1,11]:=h[d].x[1,0]+30-random(10);
h[d].y[1,11]:=h[d].y[1,0]-30+random(10);
h[d].x[1,12]:=h[d].x[1,0]+80-random(10);
h[d].y[1,12]:=h[d].y[1,0]-50+random(10);
setcolor(15);
for a:=1 to 12 do
line(trunc(h[d].x[1,a]),trunc(h[d].y[1,a]),trunc(h[d].x[1,a+1]),trunc(h[d].y[1,a+1]));
{_maalaa(trunc(h[d].x[1,0]),trunc(h[d].y[1,0])-10,4,15); }
delay(500);
sound(random(100));
setcolor(0);
{_maalaa(trunc(h[d].x[1,0]),trunc(h[d].y[1,0])-10,0,15);}
for a:=1 to 12 do
line(trunc(h[d].x[1,a]),trunc(h[d].y[1,a]),trunc(h[d].x[1,a+1]),trunc(h[d].y[1,a+1]));
end;
nosound;
end;
procedure pikkukartanpiirto;
begin
_tayttovari(0);
bar(0,400,639,479);
setcolor(2);
for a:=2 to kartankoko do begin
if mapt[a-1]=4 then
setcolor(3)
else if mapt[a-1]<=2 then
setcolor(7)
else setcolor(2);
line(trunc(a*bb-bb),408+trunc(map[a]*aa),trunc((a-1)*bb-bb),408+trunc(map[a-1]*aa));
end;
end;
procedure alkukuva;
begin
na[1]:='Kaasua lis„„ ......... ';
na[2]:='Kaasua pois .......... ';
na[3]:='Vasen ................ ';
na[4]:='Ymp„ri k„„ntyminen ... ';
na[5]:='Oikea ................ ';
na[6]:='Ampuminen ............ ';
na[7]:='Aseen vaihto ......... ';
vaih[0]:='0) Aloita peli';
vaih[1]:='1) 1-pelaajan n„pp„imet';
vaih[2]:='2) 2-pelaajan n„pp„imet';
vaih[3]:='3) Uusi kartta';
kartansuunnittelu;
settextjustify(centertext,centertext);
settextstyle(1,0,8);
setcolor(12);
outtextXY(322,50,'Helikopteripeli');
setcolor(14);
outtextXY(318,54,'Helikopteripeli');
settextjustify(lefttext,lefttext);
settextstyle(0,0,0);
setcolor(8);
for a:=0 to 3 do
outtextXY(50,200+a*20,vaih[a]);
setcolor(4);
for a:=0 to 3 do
outtextXY(49,201+a*20,vaih[a]);
merkki:='h';
repeat
merkki:=readkey;
if (merkki='1') or (merkki='2') then begin
val(merkki,a,b);
b:=a mod 2 +1;
for q:=1 to 7 do begin
setcolor(8);
settextjustify(righttext,lefttext);
outtextXY(590,180+20*q,na[q]);
setcolor(12);
outtextXY(589,181+20*q,na[q]);
repeat
h[a].nap[q]:=readkey;
for c:=1 to 7 do
if h[b].nap[c]=h[a].nap[q] then h[a].nap[q]:=_esc;
if q>1 then
for c:=1 to q-1 do
if h[a].nap[c]=h[a].nap[q] then h[a].nap[q]:=_ESC;
until h[a].nap[q]<>_esc;
setcolor(8);
outtextXY(590,180+20*q,+h[a].nap[q]);
setcolor(12);
outtextXY(589,181+20*q,+h[a].nap[q]);
end;
_tayttovari(0);
delay(200);
bar(590,192,397,324);
end;
if (merkki='3') then begin
kartansuunnittelu;
pikkukartanpiirto;
end;
{if (merkki='0') then begin
assign(f,'C:\helikopt.nap');
rewrite(f);
for c:=1 to 7 do
write(f,nap[1,c]);
for c:=1 to 7 do
write(f,nap[2,c]);
close(f);
assign(f1,'C:\helikopt.map');
rewrite(f1);
for c:=1 to kartankoko do
write(f1,map[c]);
close(f1);
assign(f2,'C:\helikopt.ma2');
rewrite(f2);
for c:=1 to kartankoko do
write(f2,mapt[c]);
close(f2);
halt(1);
end; }
until merkki='0';
end;
begin
randomize;
grafiikkatilaan;
alkukuva;
h[1].nap[1]:='a'; h[2].nap[1]:='8';
h[1].nap[2]:='z'; h[2].nap[2]:='2';
h[1].nap[3]:='x'; h[2].nap[3]:='4';
h[1].nap[4]:='c'; h[2].nap[4]:='5';
h[1].nap[5]:='v'; h[2].nap[5]:='6';
h[1].nap[6]:=_space; h[2].nap[6]:=_ret;
t:=0;t2:=0;
merkki:='i';
kartansuunnittelu;
poyta;
for d:=1 to 2 do
alkutiedot;
{delay(5000);}
{*************************** Pelin kierto *********************************}
repeat
{putpixel(x,y,0);luehiiri(x,y,status);putpixel(x,y,15);}
t:=t mod 200 + 1; {Kuin monta kuvaa piirt„m„tt„}
{************************* N„pp„imet ************************************}
if keypressed then begin
merkki:=readkey;
for d:=1 to 2 do begin
if h[d].loser<11 then begin
{********************* Kaasu + **************************************}
if merkki=h[d].nap[1] then begin
if (trunc(h[d].vk)>-maxkaasu) then begin
h[d].vk:=h[d].vk-2;
if h[d].vtuki<>0 then h[d].vtuki:=0;
_tayttovari(2);
if h[d].vk>-11 then _tayttovari(14);
if h[d].vk>-6 then _tayttovari(4);
bar(40-trunc(h[d].vk*5)+319*(d-1),451,48-trunc(h[d].vk*5)+319*(d-1),462);
end;
end;
{********************* Kaasu - **************************************}
if merkki=h[d].nap[2] then begin
if (trunc(h[d].vk)<0) then begin
h[d].vk:=h[d].vk+2;
_tayttovari(0);
bar(50-trunc(h[d].vk*5)+319*(d-1),451,58-trunc(h[d].vk*5)+319*(d-1),462);
end;
end;
{********************* K„„ntyminen - ********************************}
if (merkki=h[d].nap[3]) and (h[d].vtuki=0) then begin
h[d].k[1]:=h[d].k[1]-aste*h[d].suunta;
if h[d].k[1]<0 then h[d].k[1]:=h[d].k[1]+360;
if h[d].k[1]>360 then h[d].k[1]:=h[d].k[1]-360;
end;
{******************** Ymp„ri k„„ntyminen ***************************}
if (merkki=h[d].nap[4]) and (h[d].vtuki=0) then begin
if h[d].ka=0 then begin
setcolor(0);
if h[d].rx[2]<>0 then
piirto(2,d,0,-h[d].rx[2]+(d-1)*323);
piirto(2,d,0,(d-1)*323);
if h[d].suunta=1 then h[d].suunta:=-1 else h[d].suunta:=1;
end
else h[d].ka:=0;
end;
{********************* K„„ntyminen + ********************************}
if (merkki=h[d].nap[5]) and (h[d].vtuki=0) then begin
h[d].k[1]:=h[d].k[1]+aste*h[d].suunta;
if h[d].k[1]<0 then h[d].k[1]:=h[d].k[1]+360;
if h[d].k[1]>360 then h[d].k[1]:=h[d].k[1]-360;
end;
{********************* Ampuminen ************************************}
if (merkki=h[d].nap[6]) then begin
if h[d].ampua=0 then
h[d].ampua:=h[d].ampua+panosper
else h[d].ampua:=0;
end;
end;
end;
end;
{************************* Luodin l„ht”arvot ****************************}
if t mod 20=0 then
for d:=1 to 2 do
if h[d].ampua<>0 then begin
h[d].luoti:=h[d].luoti mod panoksia + 1;
if (h[d].py[1,h[d].luoti])=500 then begin
h[d].ampua:=h[d].ampua-1;
h[d].px[1,h[d].luoti]:=h[d].hx[1]+h[d].x[1,2];
h[d].px[2,h[d].luoti]:=h[d].px[1,h[d].luoti]-h[d].hx[1];
h[d].py[1,h[d].luoti]:=h[d].y[1,2];
h[d].py[2,h[d].luoti]:=h[d].py[1,h[d].luoti];
h[d].ptx3[h[d].luoti]:=trunc(h[d].px[1,h[d].luoti]-h[d mod 2 + 1].hx[1]);
c:=90;
h[d].pvx[h[d].luoti]:=h[d].suunta*kosi(h[d].k[1]+c)*panosnopeus/(1+random(10)/40);
h[d].pvy[h[d].luoti]:=sini(h[d].k[1]+c)*panosnopeus/(1+random(10)/40);
h[d].panosmatka[h[d].luoti]:=panoskantama;
end;
end;
{************************* t ****************************************}
if (t mod 100=0) then begin
t2:=t2 mod tykkeja +1;
if (ty[t2].matka=0) and (ty[t2].energy>0) then begin
ty[t2].aste:=sqrt(sqr(ty[1].y-1-h[ty[t2].kohde].y[1,0])+sqr(ty[t2].hx-h[ty[t2].kohde].hx[1]));
if (ty[t2].aste<250) then begin
ty[t2].aste:=(ty[t2].y-1-h[ty[t2].kohde].y[1,0])/(ty[t2].hx-h[ty[t2].kohde].hx[1]);
ty[t2].pvx:=-(ty[t2].hx-h[ty[t2].kohde].hx[1])/100;
ty[t2].pvy:=ty[t2].pvx*ty[t2].aste;
ty[t2].aste:=tyluotiv/(sqrt(sqr(ty[t2].pvx)+sqr(ty[t2].pvy)));
ty[t2].pvx:=ty[t2].pvx*ty[t2].aste;
ty[t2].pvy:=ty[t2].pvy*ty[t2].aste;
ty[t2].px[1]:=ty[t2].hx+(koko20/tyluotiv)*ty[t2].pvx;
ty[t2].px[2]:=ty[t2].px[1];
ty[t2].py[1]:=ty[t2].y-1+(koko20/tyluotiv)*ty[t2].pvy;
ty[t2].py[2]:=ty[t2].py[1];
ty[t2].matka:=150;
end;
end;
end;
for e:=1 to tykkeja do
if ty[e].matka<>0 then begin
ty[e].px[1]:=ty[e].px[1]+ty[e].pvx;
ty[e].py[1]:=ty[e].py[1]+ty[e].pvy;
ty[e].matka:=ty[e].matka-1;
for d:=1 to 2 do begin
if (sqrt(sqr(ty[e].px[1]-h[d].hx[1])+sqr(ty[e].py[1]-h[d].y[1,0]))<koko15) then begin
sound(300);
delay(1);
nosound;
delay(1);
_tayttovari(8);
bar(215+h[d].energy*5+319*(d-1),451,218+h[d].energy*5+319*(d-1),462);
h[d].energy:=h[d].energy-1;
if h[d].energy=0 then begin
bar(215+h[d].energy*5+319*(d-1),451,218+h[d].energy*5+319*(d-1),462);
{setcolor(6);
circle(trunc(xx[1,d,0]),trunc(h[d].y[1,0]),70);
_maalaa(trunc(xx[1,d,0]),trunc(h[d].y[1,0]),14,6);}
h[d].loser:=11;
h[d].vk:=0;
end;
if h[d].energy<=10 then begin
h[d].loser:=11-h[d].energy
end;
if h[d].vtuki<>0 then h[d].vtuki:=0;
h[d].vx:=h[d].vx+ty[e].pvx/panoskimpo;
h[d].vy:=h[d].vy+ty[e].pvy/panoskimpo;
ty[e].matka:=0;
end;
end;
for d:=1 to 2 do begin
if (abs(ty[e].ptx3[d])<=157) then
putpixel(trunc(ty[e].ptx3[d]+158+323*(d-1)),trunc(ty[e].py[2]),0);
if (abs(ty[e].px[1]-h[d].hx[1])<=157) and (ty[e].matka>0) then
putpixel(trunc(ty[e].px[1]-h[d].hx[1]+158+323*(d-1)),trunc(ty[e].py[1]),13+ty[e].puoli);
end;
for d:=1 to 2 do begin
ty[e].px[2]:=ty[e].px[1]-h[d].hx[1];
ty[e].ptx3[d]:=ty[e].px[2];
end;
ty[e].py[2]:=ty[e].py[1];
end;
{************************* Hidastaja jos ei panoksia ********************}
for d:=1 to 2 do
if h[d].ampua=0 then delay(5);
{************************* Panoksia liikkuu *****************************}
for a:=1 to panoksia do
for d:=1 to 2 do
if h[d].py[1,a]<500 then begin
h[d].px[1,a]:=h[d].px[1,a]+h[d].pvx[a];
h[d].py[1,a]:=h[d].py[1,a]+h[d].pvy[a];
h[d].panosmatka[a]:=h[d].panosmatka[a]-1;
{panos katoo}
if h[d].panosmatka[a]=0 then
h[d].py[1,a]:=500;
sx:=trunc((h[d].px[1,a]+158)/ktark);
karttaero:=h[d].px[1,a]+158-sx*ktark;
if sx<1 then sx:=1;
if sx>=kartankoko then sx:=sx mod 2 + kartankoko-2;
kulmakartta:=-(map[sx]-map[sx+1])/ktark;
maah[0]:=map[sx]+trunc(karttaero*kulmakartta);
if (maah[0]<h[d].py[1,a]) then
h[d].py[1,a]:=500;
if (trunc(h[d].px[1,a]-h[d].hx[1])<=315) and (trunc(h[d].px[1,a]-h[d].hx[1])>=1)then
putpixel(trunc(h[d].px[1,a]-h[d].hx[1])+323*(d-1),trunc(h[d].py[1,a]),13+d);
if (trunc(h[d].px[2,a])<=315) and (trunc(h[d].px[2,a])>=1) then
putpixel(trunc(h[d].px[2,a])+323*(d-1),trunc(h[d].py[2,a]),0);
{toisen kuvaruutu panokset}
c:=d mod 2 +1;
if (sqrt(sqr(h[d].px[1,a]-h[c].hx[1]-158)+sqr(h[d].py[1,a]-h[c].y[1,0]))<koko15) then begin
sound(300);
delay(1);
nosound;
delay(1);
h[d].panosmatka[a]:=1;
_tayttovari(8);
bar(215+h[c].energy*5+319*(c-1),451,218+h[c].energy*5+319*(c-1),462);
h[c].energy:=h[c].energy-1;
if h[c].energy=0 then begin
bar(215+h[c].energy*5+319*(c-1),451,218+h[c].energy*5+319*(c-1),462);
{setcolor(6);
circle(trunc(xx[1,c,0]),trunc(h[c].y[1,0]),70);
_maalaa(trunc(xx[1,c,0]),trunc(h[c].y[1,0]),14,6);}
h[c].loser:=11;
h[c].vk:=0;
end;
if h[c].energy<=10 then begin
h[c].loser:=11-h[c].energy
end;
if h[c].vtuki<>0 then h[c].vtuki:=0;
h[c].vx:=h[c].vx+h[d].pvx[a]/panoskimpo;
h[c].vy:=h[c].vy+h[d].pvy[a]/panoskimpo;
end;
for e:=1 to tykkeja do
if ty[e].energy>0 then
if (sqrt(sqr(h[d].px[1,a]-ty[e].hx-158)+sqr(h[d].py[1,a]-ty[e].y))<koko20) then begin
sound(400);
delay(1);
nosound;
delay(1);
h[d].panosmatka[a]:=1;
ty[e].energy:=ty[e].energy-1;
if ty[e].energy=0 then begin
ty[e].energy:=-20;
end;
end;
if (trunc(h[d].px[1,a]-h[c].hx[1])<=315) and (trunc(h[d].px[1,a]-h[c].hx[1])>=1) then
putpixel(trunc(h[d].px[1,a]-h[c].hx[1]+323*(2-d)),trunc(h[d].py[1,a]),13+d);
if (trunc(h[d].ptx3[a])<=315) and (trunc(h[d].ptx3[a])>=1) then
putpixel(h[d].ptx3[a]+323*(2-d),trunc(h[d].py[2,a]),0);
h[d].ptx3[a]:=trunc(h[d].px[1,a]-h[c].hx[1]);
h[d].px[2,a]:=h[d].px[1,a]-h[d].hx[1]; h[d].py[2,a]:=h[d].py[1,a];
end;
{if t mod 20=1 then begin
_tayttovari(0);
bar(1,1,100,30);
setcolor(15);
d:=1;
_kirjoitadesluku(2,2,4,4,ty[1].kory[1]);
_kirjoitadesluku(2,12,4,4,-random(3)+1);
end;}
{************************* K„„nt„j„ *************************************}
if (t mod 20 = 15) then
for d:=1 to 2 do
if (h[d].loser>=11) then begin
a:=-random(3)+1;
h[d].k[1]:=h[d].k[1]+h[d].suunta*aste*a;
if h[d].k[1]<0 then h[d].k[1]:=h[d].k[1]+360;
if h[d].k[1]>360 then h[d].k[1]:=h[d].k[1]-360;
end;
{************************* Vauhdit & Paikkakordinaatit ******************}
for d:=1 to 2 do begin
h[d].v:=h[d].vk/sca;
h[d].vy:=h[d].vy+sini(h[d].k[1])*h[d].v+g/sca-h[d].vtuki;
h[d].vx:=h[d].vx+kosi(h[d].k[1])*h[d].v*h[d].suunta;
{ILMANVASTUS}
h[d].vy:=h[d].vy/ilmanvastus;
h[d].vx:=h[d].vx/ilmanvastus;
h[d].hx[1]:=h[d].hx[1]+h[d].vx;
h[d].kx[1]:=trunc((h[d].hx[1]+h[d].x[1,0]+1)/ktark);
end;
{************************************************************************}
for d:=1 to 2 do
helkkarinkoordinaatit2;
{************************* Kattoon lento ********************************}
if (t=3) then
for d:=1 to 2 do
if (h[d].y[1,0]<koko10) and (h[d].vk<>0) then begin
_tayttovari(0);
bar(50+319*(d-1),451,48-trunc(h[d].vk*5)+319*(d-1),462);
h[d].vk:=0;
end;
{************************* Maahan t”rm„„minen ***************************}
for d:=1 to 2 do begin
for a:=1 to 6 do begin
karttaero:=h[d].kx[1]*ktark-h[d].hx[1]-158;
c:=0;
repeat
c:=c+1;
karttaero:=karttaero+ktark;
until karttaero+ktark>=h[d].x[1,a];
sx:=h[d].kx[1]+c;
if sx<1 then sx:=1;
if sx>=kartankoko then sx:=sx mod 2 + kartankoko-2;
kulmakartta:=-(map[sx]-map[sx+1])/ktark;
karttaero:=-((h[d].kx[1]+c)*ktark-h[d].hx[1]-158-h[d].x[1,a]);
maah[a]:=map[sx]+round(karttaero*kulmakartta);
{
setcolor(0);
if (d=2) and (a=6) then line(trunc(h[d].x[2,a]+323*(d-1)),447,trunc(h[d].x[2,a]+323*(d-1)),260);
setcolor(15);
if (d=2) and (a=6) then line(trunc(h[d].x[1,a]+323*(d-1)),447,trunc(h[d].x[1,a]+323*(d-1)),maah[0]);
}
end;
for a:=1 to 6 do
if h[d].y[1,a]>maah[a] then begin
{** laskeutuminen **}
if (maah[1]<443) and (h[d].vy<0.2) and (abs(maah[1]-maah[2])<1) and (a<3) and (h[d].k[1]>80) and (h[d].k[1]<110) then begin
h[d].y[1,0]:=maah[1]-koko15-1;
h[d].k[1]:=90;
h[d].ka:=0;
h[d].vtuki:=(h[d].vk+g)/sca;
if h[d].vtuki<0 then h[d].vtuki:=0;
h[d].v:=h[d].vk/sca;
h[d].vy:=0;
h[d].vx:=0;
helkkarinkoordinaatit2;
helkkarinkoordinaatit;
end
else h[d].loser:=100;
end;
end;
{************************* Kummaus **************************************}
if t mod 20=0 then begin
for d:=1 to 2 do
helkkarinkoordinaatit;
for d:=1 to 2 do
kummaus;
setcolor(0);
maapiirto(2); {maa}
end;
{************************* Piirto Maa & Helik. **************************}
if t mod 20=0 then begin
setcolor(15);
for d:=1 to 2 do begin
c:=d mod 2 +1;
if abs(h[d].hx[1]-h[c].hx[1])<157-koko40 then begin
h[d].rx[1]:=h[c].hx[1]-h[d].hx[1]-323*(c-d);
piirto(1,c,c+13,h[d].rx[1]+(c-1)*323);
end
else h[d].rx[1]:=0;
h[d].rx[2]:=h[d].rx[1];
piirto(1,d,d+13,(d-1)*323);
h[d].pro:=h[d].pro+h[d].prok*trunc(-h[d].vk/2);
if h[d].pro>25 then h[d].pro:=25;
if h[d].pro<0 then h[d].pro:=0;
if h[d].pro=25 then h[d].prok:=-1;
if h[d].pro=0 then h[d].prok:=1;
end;
{maa}
setcolor(2);
maapiirto(1);
for a:=1 to 2 do begin
for d:=1 to 2 do
if (h[d].kx[2]<kartankoko-1) and (h[d].y[2,0]>0) then
putpixel(160+319*(a-1)+trunc((h[d].hx[2]+316)*bb/ktark-bb),aaa+trunc(h[d].y[2,0]*aa+aa),0);
for d:=1 to 2 do
if (h[d].kx[1]<kartankoko-1) and (h[d].y[1,0]>0) then
putpixel(160+319*(a-1)+trunc((h[d].hx[1]+316)*bb/ktark-bb),aaa+trunc(h[d].y[1,0]*aa+aa),13+d);
end;
{savu}
{ if h[d].loser>0 then
for a:=1 to h[d].loser do
}
for d:=1 to 2 do begin
for a:=0 to 19 do begin
h[d].x[2,a]:=h[d].x[1,a];
h[d].y[2,a]:=h[d].y[1,a];
end;
h[d].hx[2]:=h[d].hx[1];
h[d].k[2]:=h[d].k[1];
h[d].kx[2]:=h[d].kx[1];
end;
end;
{************************* Kuoleminen ***********************************}
for d:=1 to 2 do
if h[d].loser=100 then begin
{rajahdys;}
{if h[d].loser=100 then d:=d mod 2 +1;}
if h[d].rx[2]<>0 then
piirto(2,d,0,-h[d].rx[2]+(d-1)*323);
{setcolor(12);
outtextXY(10,235,'Winner: PLAYER');
_kirjoitakokluku(380,235,1,d);
delay(20000);}
_tayttovari(0);
bar(1+323*(d-1),0,315+323*(d-1),vesi);
bar(50+319*(d-1),451,48-trunc(h[d].vk*5)+319*(d-1),462);
alkutiedot; {Energia loppu PS. kato yl”s}
end;
until merkki=_esc;
end.
Worm game
A worm game using Turbo Pascal was (naturally) also coded. Most of the snake games had possibility for multiplayer game and edit levels (walls etc.) in separate editor. A start menu was based on this plan:
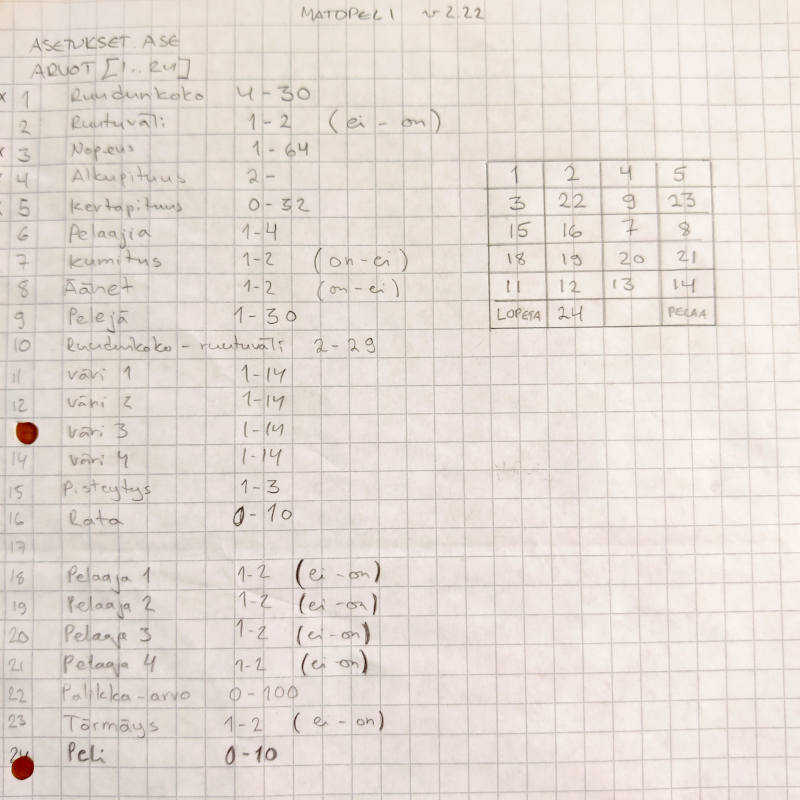
It is actually interesting observation that it took long time for me to understand that in games and nowadays in developed dashboards it isn’t good idea to make it possible to edit and change all the parameters. Does it really matter how rectangles are separated (ruuduväli) and how many points players get by eating “fruits”? Ok, if 0 points are given, then last worm moving wins.
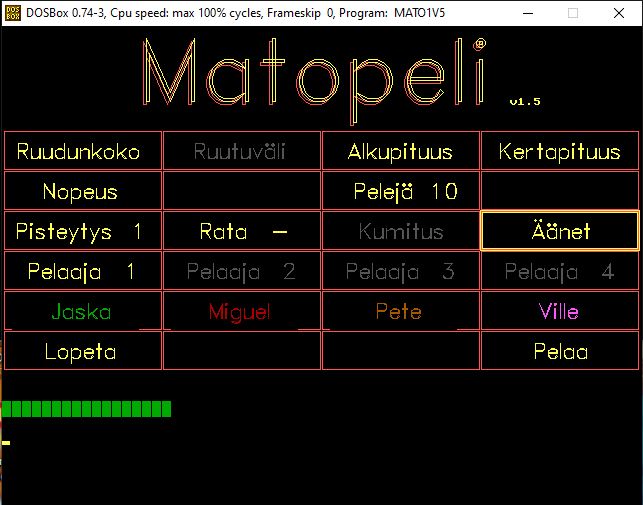
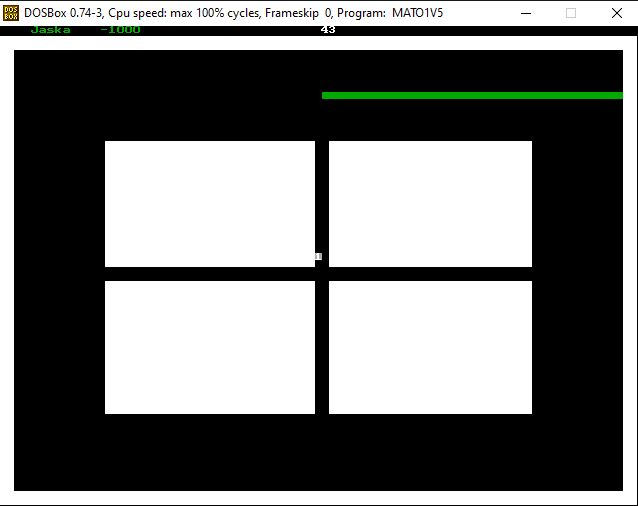


Installation files available here: MATO.zip. Download file, unzip it and run SIIRRA.BAT. It will create folder “mato” to c-disk and copy files there. Note that worm game level paths are hard coded and thus game works only if it is in location C:/mato/. 😓 Play game using the DOSBox and start it by PELAA.bat as
Z:\> mount C C:\MATO
Z:\> C:
C:\> PELAA